
What We Miss When We Talk About AI
Most conversations about AI focus on data and models—but the real advances often come from the systems that run them.
Most conversations about AI focus on data and models—but the real advances often come from the systems that run them.
The program offers non–computer science majors a pathway to gain essential AI knowledge while emphasizing responsible and ethical applications.
In this conversation, Dean Shih-Fu Chang and Vice Dean Vishal Misra discuss how the School is driving and responding to this exciting moment in the development of artificial intelligence.
Steven Feiner worked with Kaveri Thakoor to create a tool that combines the pattern-recognition power of AI with the domain expertise of human medical experts. The AI-powered decision support tool assists doctors in diagnosing eye disease.
Blei is recognized for his groundbreaking work in machine learning, in particular his field-defining contributions in the areas of topic models and stochastic variational inference.
New York City has tapped Jeannette Wing and Clifford Stein to advise the city on artificial intelligence.
ARNI Director Zemel goes to Washington to explain to Congress how Columbia’s new AI institute will connect major progress made in AI systems to our understanding of the brain.
The projects will explore algorithmic fairness, unified methods for interpreting artistic images found on the internet, and the development of a differentially-private data market system.
Research papers from the department were accepted to the 11th International Conference on Learning Representations (ICLR 2023). ICLR is the premier conference on deep learning where researchers gather to discuss their work in the fields of artificial intelligence, statistics, and data science.
Visual Classification via Description from Large Language Models
Sachit Menon Columbia University, Carl Vondrick Columbia University
Keywords: vision-language models, CLIP, prompting, GPT-3, large language models, zero-shot recognition, multimodal
TL;DR: We enhance zero-shot recognition with vision-language models by comparing to category descriptors from GPT-3, enabling better performance in an interpretable setting that also allows for the incorporation of new concepts and bias mitigation.
Abstract:
Vision-language models such as CLIP have shown promising performance on a variety of recognition tasks using the standard zero-shot classification procedure — computing similarity between the query image and the embedded words for each category. By only using the category name, they neglect to make use of the rich context of additional information that language affords. The procedure gives no intermediate understanding of why a category is chosen and furthermore provides no mechanism for adjusting the criteria used towards this decision. We present an alternative framework for classification with VLMs, which we call classification by description. We ask VLMs to check for descriptive features rather than broad categories: to find a tiger, look for its stripes; its claws; and more. By basing decisions on these descriptors, we can provide additional cues that encourage using the features we want to be used. In the process, we can get a clear idea of what the model “thinks” it is seeing to make its decision; it gains some level of inherent explainability. We query large language models (e.g., GPT-3) for these descriptors to obtain them in a scalable way. Extensive experiments show our framework has numerous advantages past interpretability. We show improvements in accuracy on ImageNet across distribution shifts; demonstrate the ability to adapt VLMs to recognize concepts unseen during training; and illustrate how descriptors can be edited to effectively mitigate bias compared to the baseline.
CROM: Continuous Reduced-Order Modeling of PDEs Using Implicit Neural Representations
Peter Yichen Chen Columbia University, Jinxu Xiang Columbia University, Dong Heon Cho Columbia University, Yue Chang University of Toronto, G A Pershing Columbia University, Henrique Teles Maia Columbia University, Maurizio M Chiaramonte Meta Reality Labs Research, Kevin Thomas Carlberg Meta Reality Labs Research, Eitan Grinspun University of Toronto
Keywords: PDE, implicit neural representation, neural field, latent space traversal, reduced-order modeling, numerical methods
TL;DR: We accelerate PDE solvers via rapid latent space traversal of continuous vector fields leveraging implicit neural representations.
Abstract:
The long runtime of high-fidelity partial differential equation (PDE) solvers makes them unsuitable for time-critical applications. We propose to accelerate PDE solvers using reduced-order modeling (ROM). Whereas prior ROM approaches reduce the dimensionality of discretized vector fields, our continuous reduced-order modeling (CROM) approach builds a low-dimensional embedding of the continuous vector fields themselves, not their discretization. We represent this reduced manifold using continuously differentiable neural fields, which may train on any and all available numerical solutions of the continuous system, even when they are obtained using diverse methods or discretizations. We validate our approach on an extensive range of PDEs with training data from voxel grids, meshes, and point clouds. Compared to prior discretization-dependent ROM methods, such as linear subspace proper orthogonal decomposition (POD) and nonlinear manifold neural-network-based autoencoders, CROM features higher accuracy, lower memory consumption, dynamically adaptive resolutions, and applicability to any discretization. For equal latent space dimension, CROM exhibits 79x and 49x better accuracy, and 39x and 132x smaller memory footprint, than POD and autoencoder methods, respectively. Experiments demonstrate 109x and 89x wall-clock speedups over unreduced models on CPUs and GPUs, respectively. Videos and codes are available on the project page: https://crom-pde.github.io
Quantile Risk Control: A Flexible Framework for Bounding the Probability of High-Loss Predictions
Jake Snell Princeton University, Thomas P Zollo Columbia University, Zhun Deng Columbia University, Toniann Pitassi Columbia University, Richard Zemel Columbia University
Keywords: distribution-free uncertainty quantification
TL;DR: We propose a framework to rigorously and flexible control the quantiles of the loss distribution incurred by a predictor or set of predictors.
Abstract:
Rigorous guarantees about the performance of predictive algorithms are necessary in order to ensure their responsible use. Previous work has largely focused on bounding the expected loss of a predictor, but this is not sufficient in many risk-sensitive applications where the distribution of errors is important. In this work, we propose a flexible framework to produce a family of bounds on quantiles of the loss distribution incurred by a predictor. Our method takes advantage of the order statistics of the observed loss values rather than relying on the sample mean alone. We show that a quantile is an informative way of quantifying predictive performance, and that our framework applies to a variety of quantile-based metrics, each targeting important subsets of the data distribution. We analyze the theoretical properties of our proposed method and demonstrate its ability to rigorously control loss quantiles on several real-world datasets.
Causal Imitation Learning via Inverse Reinforcement Learning
Kangrui Ruan Columbia University, Junzhe Zhang Columbia University, Xuan Di Columbia University, Elias Bareinboim Columbia University
Keywords: Causal Inference, Graphical Models
TL;DR: This paper proposes novel inverse reinforcement learning methods to learn effective imitating policies from the expert’s demonstrations when unobserved confounders are present.
Abstract:
One of the most common ways children learn when unfamiliar with the environment is by mimicking adults. Imitation learning concerns an imitator learning to behave in an unknown environment from an expert’s demonstration; reward signals remain latent to the imitator. This paper studies imitation learning through causal lenses and extends the analysis and tools developed for behavior cloning (Zhang, Kumor, Bareinboim, 2020) to inverse reinforcement learning. First, we propose novel graphical conditions that allow the imitator to learn a policy performing as well as the expert’s behavior policy, even when the imitator and the expert’s state-action space disagree, and unobserved confounders (UCs) are present. When provided with parametric knowledge about the unknown reward function, such a policy may outperform the expert’s. Also, our method is easily extensible and allows one to leverage existing IRL algorithms even when UCs are present, including the multiplicative-weights algorithm (MWAL) (Syed & Schapire, 2008) and the generative adversarial imitation learning (GAIL) (Ho & Ermon, 2016). Finally, we validate our framework by simulations using real-world and synthetic data.
Neural Causal Models for Counterfactual Identification and Estimation
Kevin Muyuan Xia Columbia University, Yushu Pan Columbia University, Elias Bareinboim Columbia University
Keywords: causal inference, deep learning, neural models, neural causal models, causal identification, causal estimation, counterfactual
TL;DR: We solve the two problems of counterfactual identification and estimation from arbitrary surrogate experiments using a Generative Adversarial Network implementation of the Neural Causal Model.
Abstract:
Evaluating hypothetical statements about how the world would be had a different course of action been taken is arguably one key capability expected from modern AI systems. Counterfactual reasoning underpins discussions in fairness, the determination of blame and responsibility, credit assignment, and regret. In this paper, we study the evaluation of counterfactual statements through neural models. Specifically, we tackle two causal problems required to make such evaluations, i.e., counterfactual identification and estimation from an arbitrary combination of observational and experimental data. First, we show that neural causal models (NCMs) are expressive enough and encode the structural constraints necessary for performing counterfactual reasoning. Second, we develop an algorithm for simultaneously identifying and estimating counterfactual distributions. We show that this algorithm is sound and complete for deciding counterfactual identification in general settings. Third, considering the practical implications of these results, we introduce a new strategy for modeling NCMs using generative adversarial networks. Simulations corroborate with the proposed methodology.
Understanding Zero-shot Adversarial Robustness for Large-Scale Models
Chengzhi Mao Columbia University, Scott Geng Columbia University, Junfeng Yang Columbia University, Xin Wang Microsoft Research, Carl Vondrick Columbia University
Keywords: Adversarial Robustness, Zero-Shot Recognition
Abstract:
Pretrained large-scale vision-language models like CLIP have exhibited strong generalization over unseen tasks. Yet imperceptible adversarial perturbations can significantly reduce CLIP’s performance on new tasks. In this work, we identify and explore the problem of adapting large-scale models for zero-shot adversarial robustness. We first identify two key factors during model adaption–training losses and adaptation methods–that affect the model’s zero-shot adversarial robustness. We then propose a text-guided contrastive adversarial training loss, which aligns the text embeddings and the adversarial visual features with contrastive learning on a small set of training data. We apply this training loss to two adaption methods, model finetuning and visual prompt tuning. We find that visual prompt tuning is more effective in the absence of texts, while finetuning wins in the existence of text guidance. Overall, our approach significantly improves the zero-shot adversarial robustness over CLIP, seeing an average improvement of 31 points over ImageNet and 15 zero-shot datasets. We hope this work can shed light on understanding the zero-shot adversarial robustness of large-scale models.
TempCLR: Temporal Alignment Representation with Contrastive Learning
Yuncong Yang Columbia University, Jiawei Ma Columbia University, Shiyuan Huang Columbia University, Long Chen Columbia University, Xudong Lin Columbia University, Guangxing Han Columbia University, Shih-Fu Chang Columbia University
Keywords: Representation learning, Global Sequence Alignment, Zero/Few-shot Transfer
TL;DR: Global sequence matching under temporal order consistency matters in contrastive-based video-paragraph/text learning.
Abstract:
Video representation learning has been successful in video-text pre-training for zero-shot transfer, where each sentence is trained to be close to the paired video clips in a common feature space. For long videos, given a paragraph of description where the sentences describe different segments of the video, by matching all sentence-clip pairs, the paragraph and the full video are aligned implicitly. However, such unit-level similarity measure may ignore the global temporal context over a long time span, which inevitably limits the generalization ability. In this paper, we propose a contrastive learning framework TempCLR to compare the full video and the paragraph explicitly. As the video/paragraph is formulated as a sequence of clips/sentences, under the constraint of their temporal order, we use dynamic time warping to compute the minimum cumulative cost over sentence-clip pairs as the sequence-level distance. To explore the temporal dynamics, we break the consistency of temporal order by shuffling the video clips or sentences according to the temporal granularity. In this way, we obtain the representations for clips/sentences, which perceive the temporal information and thus facilitate the sequence alignment. In addition to pre-training on the video and paragraph, our approach can also generalize on the matching between different video instances. We evaluate our approach on video retrieval, action step localization, and few-shot action recognition, and achieve consistent performance gain over all three tasks. Detailed ablation studies are provided to justify the approach design.
A PhD candidate who worked for OpenAI and Apple discusses natural language processing, AI hallucinations, and deep fakes.
OpenAI’s ChatGPT is an artificial intelligence (AI) chatbot that is trained to follow the instruction in a prompt and give a detailed response. It is built upon GPT-3, a type of large language model (LLM) that predicts and generates text. Given a sequence of words, it will predict the word that has the highest probability of following next (kind of like autocomplete). These models are trained on huge datasets that allow them to generate answers to questions. ChatGPT works quickly and gives answers within seconds, and it also learns from every interaction and improves daily.
It can create a letter to your super asking for a repair to be done, write code and fix bugs, and suggest plot summaries for novels. But that does not mean that it is perfect. The problem with LLMs is that they can “hallucinate” and make things up. ChatGPT is guilty of this; some of the answers in its outputs do not even exist. It is also not trained to be truthful and it answers queries with a lot of confidence and authority, which is worrisome.
It is being compared to the last great tech disruption–the internet’s onset in the 1990s. We asked CS professors what the technology could do and how to use the tool the right way.
Vishal Misra
I have been using GPT-3 for over two years now. It is the underlying model behind my cricket search app for ESPN.
The original interface was cumbersome and needed an analyst who could use specialized programming languages to access the answer.
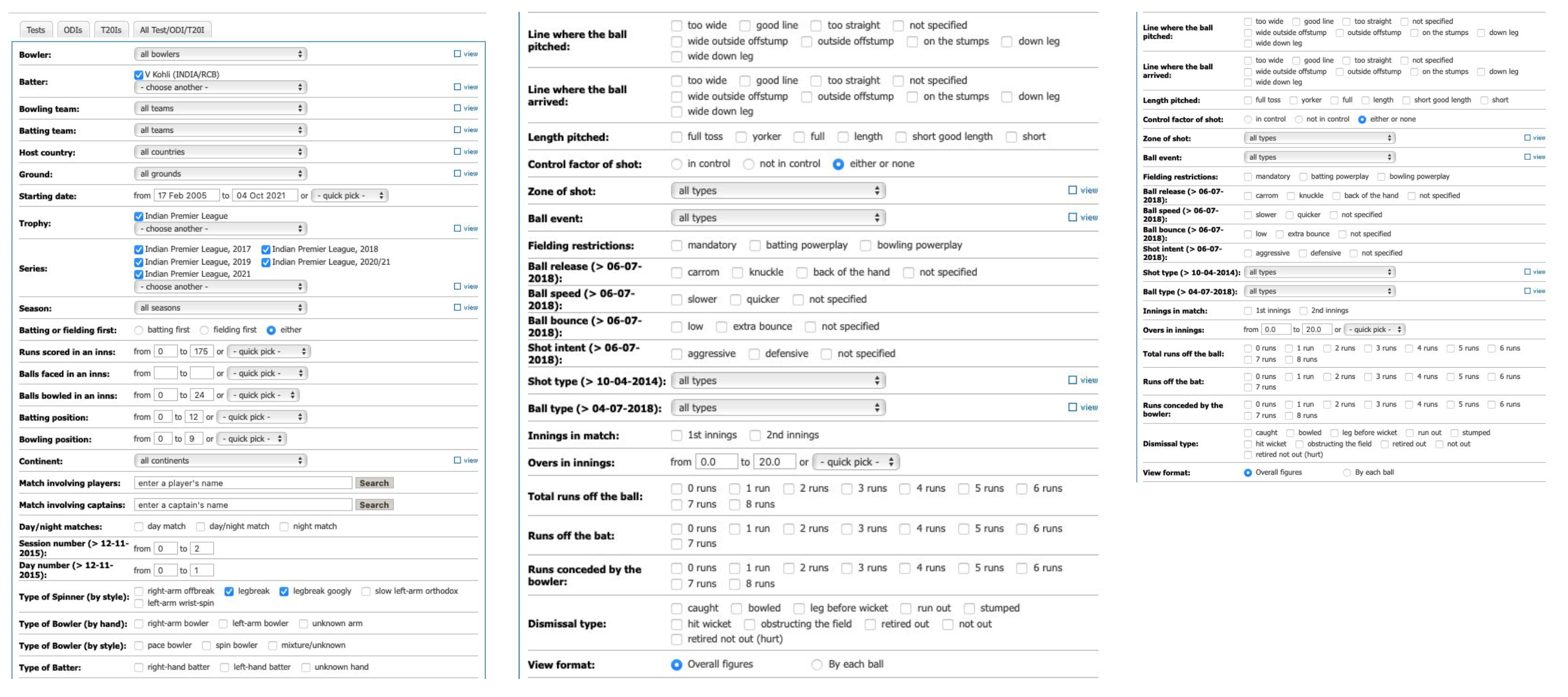
We developed AskCricInfo, which takes human input–questions or search queries–and converts the queries into a structured language like SQL that machines understand. The technology can “translate” the question into a programming language, find the answer, and quickly send it back to the user.
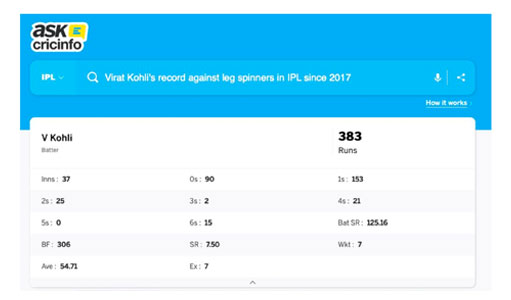
It is an excellent example of the power of underlying technology and what the tool can do. ChatGPT is very interesting. It is the first chatbot that makes “intelligent” and engaging conversations. There are definite use cases for making it a very effective teaching tool. It is up to the instructors to imagine a world where something like ChatGPT will always be available and teach students how to use it effectively. A lot can go wrong with ChatGPT- primarily because of its design that makes it bullshit confidently. But that is a problem with all LLMs, not just ChatGPT.
Kathy McKeown
ChatGPT and the technology it is built on, GPT3, are game changers. With them and the other large language models that have recently emerged, models can now produce extremely fluent text. They are also able to perform a variety of tasks in a way that was not previously possible. And there are many situations in which they can be used to help us do things that we previously found tedious. But they are not able to do as much as we might initially have imagined. They have limitations that are not always immediately obvious, and researchers are taking the time to study them so that we can accurately characterize what they can and cannot do. Nonetheless, they change how we do research in the natural language field and how we build new models to carry out other tasks.
I think we need to learn how to incorporate them into our teaching because they are here to stay. Students know about them and will know how to use them. We will need to think creatively about how to teach students what these tools do well and what they do poorly, when they can be used as a tool to aid in research, and situations in which it would be dishonest. I imagine situations where we ask ChatGPT to answer an essay question, ask the student to critique the essay and identify what it does poorly, and then ask the student to write an essay that goes beyond what ChatGPT can do.
The worst problem with ChatGPT is that it is not always truthful. In fact, it may often lie or hallucinate facts. It does this very fluently, making its lies sound very plausible. This is quite a barrier to use in a real-world situation unless it is used by someone who knows what is correct, what is not, and can sift the good from the bad. Technology constantly changes, though, and it is a problem that researchers are actively working on.
Itsik Pe’er
I asked ChatGPT about AI language models, and this is the output:
AI language models like ChatGPT, its competitors and successors represent a significant advancement in the field of Natural Language Processing (NLP). These models have the ability to generate human-like text based on a massive amount of input data, making them useful for various applications such as chatbots, question-answering systems, and content generation.
However, it is important to note that despite their sophisticated capabilities, they still have limitations and may generate outputs that are inaccurate, biased, or inappropriate. It is crucial to ensure responsible development and deployment of these models to maximize their benefits while minimizing potential harm.
The above demonstrates my thoughts more than I could otherwise express. In particular: it is already useful, but often not out-of-the-box, but I am a techno-optimist and believe even more usefulness is coming.
As a former judge in high school debate competitions, it reminds me of the most eloquent contestants, who would, if they needed to, lie through their teeth without missing a heartbeat. For instance, in response to this prompt, “What could go wrong with tools like ChatGPT?”, it writes:
There are several potential risks associated with the use of AI language models like ChatGPT:
Bias: AI models are trained on large amounts of text data, which may reflect societal biases and lead to biased outputs.
Misinformation: AI models may generate false or misleading information, which could have serious consequences if relied upon.
Privacy Concerns: AI models process large amounts of personal information, raising privacy and security concerns.
Misuse: AI models may be used for malicious purposes, such as spreading hate speech, fake news, or conducting phishing attacks.
Job Loss: AI models may automate certain tasks, leading to job loss in industries that rely on those tasks.
Therefore, it is important to carefully consider the potential risks and consequences of AI models and to develop and deploy them responsibly to minimize potential harm.
These are all valid points, but more context needs to be considered:
Teaching AI to distinguish between causation and correlation would be a game changer— well, the game may be about to change.
The J.P. Morgan AI Research Awards 2021 partners with research thinkers across artificial intelligence.
Research from the department has been accepted to the 2021 Computer Vision and Pattern Recognition (CVPR) Conference. The annual event explores machine learning, artificial intelligence, and computer vision research and its applications.
Open-Vocabulary Object Detection Using Captions
Alireza Zareian Snap Inc. and Columbia University, Kevin Dela Rosa Snap Inc., Derek Hao Hu Snap Inc., Shih-Fu Chang Columbia University
Abstract
Despite the remarkable accuracy of deep neural networks in object detection, they are costly to train and scale due to supervision requirements. Particularly, learning more object categories typically requires proportionally more bounding box annotations. Weakly supervised and zero-shot learning techniques have been explored to scale object detectors to more categories with less supervision, but they have not been as successful and widely adopted as supervised models. In this paper, we put forth a novel formulation of the object detection problem, namely open-vocabulary object detection, which is more general, more practical, and more effective than weakly supervised and zero-shot approaches. We propose a new method to train object detectors using bounding box annotations for a limited set of object categories, as well as image-caption pairs that cover a larger variety of objects at a significantly lower cost. We show that the proposed method can detect and localize objects for which no bounding box annotation is provided during training, at a significantly higher accuracy than zero-shot approaches. Meanwhile, objects with bounding box annotation can be detected almost as accurately as supervised methods, which is significantly better than weakly supervised baselines. Accordingly, we establish a new state-of-the-art for scalable object detection.
Vx2Text: End-to-End Learning of Video-Based Text Generation From Multimodal Inputs
Xudong Lin Columbia University, Gedas Bertasius Facebook AI, Jue Wang Facebook AI, Shih-Fu Chang Columbia University, Devi Parikh Facebook AI and Georgia Tech, Lorenzo Torresani Facebook AI and Dartmouth
Abstract
We present Vx2Text, a framework for text generation from multimodal inputs consisting of video plus text, speech, or audio. In order to leverage transformer networks, which have been shown to be effective at modeling language, each modality is first converted into a set of language embeddings by a learnable tokenizer. This allows our approach to perform multimodal fusion in the language space, thus eliminating the need for ad-hoc cross-modal fusion modules. To address the non-differentiability of tokenization on continuous inputs (e.g., video or audio), we utilize a relaxation scheme that enables end-to-end training. Furthermore, unlike prior encoder-only models, our network includes an autoregressive decoder to generate open-ended text from the multimodal embeddings fused by the language encoder. This renders our approach fully generative and makes it directly applicable to different “video+x to text” problems without the need to design specialized network heads for each task. The proposed framework is not only conceptually simple but also remarkably effective: experiments demonstrate that our approach based on a single architecture outperforms the state-of-the-art on three video-based text-generation tasks—captioning, question answering, and audio-visual scene-aware dialog. Our code will be made publicly available.
Co-Grounding Networks With Semantic Attention for Referring Expression Comprehension in Videos
Sijie Song Wangxuan Institute of Computer Technology, Xudong Lin Columbia University, Jiaying Liu Wangxuan Institute of Computer Technology, Zongming Guo Wangxuan Institute of Computer Technology, Shih-Fu Chang Columbia University
Abstract
In this paper, we address the problem of referring expression comprehension in videos, which is challenging due to complex expression and scene dynamics. Unlike previous methods which solve the problem in multiple stages (i.e., tracking, proposal-based matching), we tackle the problem from a novel perspective, co-grounding, with an elegant one-stage framework. We enhance the single-frame grounding accuracy by semantic attention learning and improve the cross-frame grounding consistency with co-grounding feature learning. Semantic attention learning explicitly parses referring cues in different attributes to reduce the ambiguity in the complex expression. Co-grounding feature learning boosts visual feature representations by integrating temporal correlation to reduce the ambiguity caused by scene dynamics. Experiment results demonstrate the superiority of our framework on the video grounding datasets VID and OTB in generating accurate and stable results across frames. Our model is also applicable to referring expression comprehension in images, illustrated by the improved performance on the RefCOCO dataset. Our project is available at https://sijiesong.github.io/co-grounding.
Seeing in Extra Darkness Using a Deep-Red Flash
Jinhui Xiong KAUST, Jian Wang Snap Research, Wolfgang Heidrich KAUST, Shree Nayar Snap Research and Columbia University
Abstract
We propose a new flash technique for low-light imaging, using deep-red light as an illuminating source. Our main observation is that in a dim environment, the human eye mainly uses rods for the perception of light, which are not sensitive to wavelengths longer than 620nm, yet the camera sensor still has a spectral response. We propose a novel modulation strategy when training a modern CNN model for guided image filtering, fusing a noisy RGB frame and a flash frame. This fusion network is further extended for video reconstruction. We have built a prototype with minor hardware adjustments and tested the new flash technique on a variety of static and dynamic scenes. The experimental results demonstrate that our method produces compelling reconstructions, even in extra dim conditions.
UC2: Universal Cross-Lingual Cross-Modal Vision-and-Language Pre-Training
Mingyang Zhou University of California, Davis, Luowei Zhou Microsoft Dynamics 365 AI Research, Shuohang Wang Microsoft Dynamics 365 AI Research, Yu Cheng Microsoft Dynamics 365 AI Research, Linjie Li Microsoft Dynamics 365 AI Research, Zhou Yu University of California, Davis and Columbia University, Jingjing Liu Microsoft Dynamics 365 AI Research
Abstract
Vision-and-language pre-training has achieved impressive success in learning multimodal representations between vision and language. To generalize this success to non-English languages, we introduce UC^2, the first machine translation-augmented framework for cross-lingual cross-modal representation learning. To tackle the scarcity problem of multilingual captions for image datasets, we first augment existing English-only datasets with other languages via machine translation (MT). Then we extend the standard Masked Language Modeling and Image-Text Matching training objectives to multilingual setting, where alignment between different languages is captured through shared visual context (eg. using image as pivot). To facilitate the learning of a joint embedding space of images and all languages of interest, we further propose two novel pre-training tasks, namely Maksed Region-to-Token Modeling (MRTM) and Visual Translation Language Modeling (VTLM), leveraging MT-enhanced translated data. Evaluation on multilingual image-text retrieval and multilingual visual question answering benchmarks demonstrates that our proposed framework achieves new state of the art on diverse non-English benchmarks while maintaining comparable performance to monolingual pre-trained models on English tasks.
Learning Goals From Failure
Dave Epstein Columbia University and Carl Vondrick Columbia University
Abstract
We introduce a framework that predicts the goals behind observable human action in video. Motivated by evidence in developmental psychology, we leverage video of unintentional action to learn video representations of goals without direct supervision. Our approach models videos as contextual trajectories that represent both low-level motion and high-level action features. Experiments and visualizations show our trained model is able to predict the underlying goals in video of unintentional action. We also propose a method to “automatically correct” unintentional action by leveraging gradient signals of our model to adjust latent trajectories. Although the model is trained with minimal supervision, it is competitive with or outperforms baselines trained on large (supervised) datasets of successfully executed goals, showing that observing unintentional action is crucial to learning about goals in video.
Generative Interventions for Causal Learning
Chengzhi Mao Columbia University, Augustine Cha Columbia University, Amogh Gupta Columbia University, Hao Wang Rutgers University, Junfeng Yang Columbia University, Carl Vondrick Columbia University
Abstract
We introduce a framework for learning robust visual representations that generalize to new viewpoints, backgrounds, and scene contexts. Discriminative models often learn naturally occurring spurious correlations, which cause them to fail on images outside of the training distribution. In this paper, we show that we can steer generative models to manufacture interventions on features caused by confounding factors. Experiments, visualizations, and theoretical results show this method learns robust representations more consistent with the underlying causal relationships. Our approach improves performance on multiple datasets demanding out-of-distribution generalization, and we demonstrate state-of-the-art performance generalizing from ImageNet to ObjectNet dataset.
Learning the Predictability of the Future
Didac Suris Columbia University, Ruoshi Liu Columbia University, Carl Vondrick Columbia University
Abstract
We introduce a framework for learning from unlabeled video what is predictable in the future. Instead of committing up front to features to predict, our approach learns from data which features are predictable. Based on the observation that hyperbolic geometry naturally and compactly encodes hierarchical structure, we propose a predictive model in hyperbolic space. When the model is most confident, it will predict at a concrete level of the hierarchy, but when the model is not confident, it learns to automatically select a higher level of abstraction. Experiments on two established datasets show the key role of hierarchical representations for action prediction. Although our representation is trained with unlabeled video, visualizations show that action hierarchies emerge in the representation.
Linear Semantics in Generative Adversarial Networks
Jianjin Xu Columbia University, Changxi Zheng Columbia University
Abstract
Generative Adversarial Networks (GANs) are able to generate high-quality images, but it remains difficult to explicitly specify the semantics of synthesized images. In this work, we aim to better understand the semantic representation of GANs, and thereby enable semantic control in GAN’s generation process. Interestingly, we find that a well-trained GAN encodes image semantics in its internal feature maps in a surprisingly simple way: a linear transformation of feature maps suffices to extract the generated image semantics. To verify this simplicity, we conduct extensive experiments on various GANs and datasets; and thanks to this simplicity, we are able to learn a semantic segmentation model for a trained GAN from a small number (e.g., 8) of labeled images. Last but not least, leveraging our finding, we propose two few-shot image editing approaches, namely Semantic-Conditional Sampling and Semantic Image Editing. Given a trained GAN and as few as eight semantic annotations, the user is able to generate diverse images subject to a user-provided semantic layout, and control the synthesized image semantics. We have made the code publicly available.
Google Research held an online workshop on the conceptual understanding of deep learning. The workshop discussed how new findings in deep learning and neuroscience can help create better artificial intelligence systems. Christos Papadimitriou discussed how our growing understanding of information-processing mechanisms in the brain might help create algorithms that are more robust in understanding and engaging in conversations. Papadimitriou presented a simple and efficient model that explains how different areas of the brain inter-communicate to solve cognitive problems.
Shuran Song and Carl Vondrick are among the awardees chosen for their artificial intelligence (AI) research. The program aims to use AI for societal good.
Research from the department was accepted to the 35th AAAI Conference on Artificial Intelligence. The conference promotes research in artificial intelligence (AI) and scientific exchange among AI researchers, practitioners, scientists, and engineers in affiliated disciplines.
Automated Symbolic Law Discovery: A Computer Vision Approach
Hengrui Xing Columbia University, Ansaf Salleb-Aouissi Columbia University, Nakul Verma Columbia University
One of the most exciting applications of modern artificial intelligence is to automatically discover scientific laws from experimental data. This is not a trivial problem as it involves searching for a complex mathematical relationship over a large set of explanatory variables and operators that can be combined in an infinite number of ways. Inspired by the incredible success of deep learning in computer vision, the authors tackle this problem by adapting various successful network architectures into the symbolic law discovery pipeline. The novelty of this new approach is in (1) encoding the input data as an image with super-resolution, (2) developing an appropriate deep network pipeline, and (3) predicting the importance of each mathematical operator from the relationship image. This allowed to prior the exponentially large search with the predicted importance of the symbolic operators, which can significantly accelerate the discovery process.
The model was then applied to a variety of plausible relationships—both simulated and from physics and mathematics domains—involving different dimensions and constituents. The authors show that their model is able to identify the underlying operators from data, achieving a high accuracy and AUC (91% and 0.96 on average resp.) for systems with as many as ten independent variables. Their method significantly outperforms the current state of the art in terms of data fitting (R^2), discovery rate (recovering the true relationship), and succinctness (output formula complexity). The discovered equations can be seen as first drafts of scientific laws that can be helpful to the scientists for (1) hypothesis building, and (2) understanding the complex underlying structure of the studied phenomena. This novel approach holds a real promise to help speed up the rate of scientific discovery.
Bounding Causal Effects on Continuous Outcome
Junzhe Zhang Columbia University, Elias Bareinboim Columbia University
One of the most common methods for policy learning used throughout the empirical sciences is the use of randomization of the treatment assignment. This method is considered the gold standard within many disciplines and can be traced back, at least, to Fisher (Fisher 1935) and Neyman (Neyman 1923). Whenever human subjects are at the center of the experiment, unfortunately, issues of non-compliance arise. Namely, subjects do not necessarily follow the experimental protocol and end up doing what they want. It is well-understood that under such conditions, unobserved confounding bias will emerge. For instance, subjects who did not comply with the treatment assignment may be precisely those who would have responded adversely to the treatment. Therefore, the actual causal effects of the treatment, when it is applied uniformly to the population, might be substantially less effective than the data reveals. Moreover, since one does not observe how subjects decide/respond to the realized treatment, the actual treatment effects are not uniquely computably from the collected data, called non-identifiable.
Robins (1989) and Manski (1990) derived the first informative bounds over the causal effects from studies with imperfect compliance under a set of non-parametric assumptions called instrumental variables (IV). In their seminal work, Balke and Pearl (1994a, 1997) improved earlier results by employing an algebraic method to derive analytic expressions of the causal bounds, which are provably optimal. However, this approach assumes the primary outcome to be discrete and finite. Solving such a program could be intractable when high-dimensional context variables are present.
This paper presents novel non-parametric methods to bound causal effects on the continuous outcome from studies with imperfect compliance. These methods could be generalized to settings with a high-dimensional context. Perhaps surprisingly, this paper introduced a latent data representation that could characterize all constraints on the observational and interventional distributions implied by IV assumptions, even when the primary outcome is continuous. Such representation allows one to reduce the original bounding problem to a series of linear programs. Solve these programs, therefore, leads to tight causal bounds.
Estimating Identifiable Causal Effects through Double Machine Learning
Yonghan Jung, Jin Tian, Elias Bareinboim Columbia University
Learning causal effects from observational data is a pervasive challenge found throughout the data-intensive sciences. General methods of determining the identifiability of causal effect from a combination of observational data and causal knowledge about the underlying system have been well-understood in theory. In practice, however, there are still challenges to estimating identifiable causal functionals from finite samples. Recently, a novel approach, named double/debiased machine learning (DML) (Chernozhukov et al. 2018), has been proposed to learn parameters leveraging modern machine learning techniques, which are both robust to model misspecification (‘doubly robust’) and slow convergence (‘debiased’). Still, DML has only been used for causal estimation in settings when the back-door condition (also known as conditional ignorability) holds.
This paper aims to bridge this gap by developing a general class of estimators for any identifiable causal functionals that exhibit robustness properties of DML estimators, which the authors called ‘DML-ID.’ In particular, they provide a complete procedure for deriving an essential ingredient of the DML estimator called an influence function (IF) and construct a general class of estimators based on the IF. This means that one can estimate any causal functional and enjoy two robustness properties, doubly robustness and debiasedness.
Ref-NMS: Breaking Proposal Bottlenecks in Two-Stage Referring Expression Grounding
Long Chen Tencent AI Lab, Wenbo Ma Zhejiang University, Jun Xiao Zhejiang University, Hanwang Zhang Nanyang Technological University, Shih-Fu Chang Columbia University
The prevailing framework for solving referring expression grounding is based on a two-stage process: 1) detecting proposals with an object detector and 2) grounding the referent to one of the proposals. Existing two-stage solutions mostly focus on the grounding step, which aims to align the expressions with the proposals.
In this paper, the researchers argue that these methods overlook an obvious mismatch between the roles of proposals in the two stages: they generate proposals solely based on the detection confidence (i.e., expression-agnostic), hoping that the proposals contain all right instances in the expression (i.e., expression-aware). Due to this mismatch, current two-stage methods suffer from a severe performance drop between detected and ground-truth proposals.
The paper proposes Ref-NMS, which is the first method to yield expression-aware proposals at the first stage. Ref-NMS regards all nouns in the expression as critical objects, and introduces a lightweight module to predict a score for aligning each box with a critical object. These scores can guide the NMS operation to filter out the boxes irrelevant to the expression, increasing the recall of critical objects, resulting in a significantly improved grounding performance.
Since RefNMS is agnostic to the grounding step, it can be easily integrated into any state-of-the-art two-stage method. Extensive ablation studies on several backbones, benchmarks, and tasks consistently demonstrate the superiority of Ref-NMS. Codes are available at: https://github.com/ChopinSharp/ref-nms.
Professor Kathy McKeown talks with DeepLearning.AI’s Andrew Ng about how she started in artificial intelligence (AI), her research projects, how her understanding of AI has changed through the decades, and AI career advice for learners of NLP.
Almost 400,000 babies were born prematurely—before 37 weeks gestation—in 2018 in the United States. One of the leading causes of newborn deaths and long-term disabilities, preterm birth (PTB) is considered a public health problem with deep emotional and challenging financial consequences to families and society. If doctors were able to use data and artificial intelligence (AI) to predict which pregnant women might be at risk, many of these premature births might be avoided.
IBM has selected assistant professor Baishakhi Ray for an IBM Faculty Award. The highly selective award is given to professors in leading universities worldwide to foster collaboration with IBM researchers. Ray will use the funds to continue research on artificial intelligence-driven program analysis to understand software robustness.
Although much research has been done, there are still countless vulnerabilities that make system robustness brittle. Hidden vulnerabilities are discovered all the time – either through a system hack or monitoring system’s functionalities. Ray is working to automatically detect system weaknesses using artificial intelligence (AI) with her project, “Improving code representation for enhanced deep learning to detect and remediate security vulnerabilities”.
One of the major challenges in AI-based security vulnerability detection is finding the best source code representation that can distinguish between vulnerable versus benign code. Such representation can further be used as an input in supervised learning settings for automatic vulnerability detection and fixes. Ray is tackling this problem by building new machine-learning models for source code and applying machine learning techniques such as code embeddings. This approach could open new ways of encoding source code into feature vectors.
“It will provide new ways to make systems secure,” said Ray, who joined the department in 2018. “The goal is to reduce the hours of manual effort spent in automatically detecting vulnerabilities and fixing them.”
A successful outcome of this project will produce a new technique to encode source code with associated trained models that will be able to detect and remediate a software vulnerability with increased accuracy.
IBM researchers Jim Laredo and Alessandro Morari will collaborate closely with Ray and her team on opportunities around design, implementation, and evaluation of this research.

They could have been at the beach enjoying the summer. Instead, high school students gathered from across New York City and New Jersey for the AI4All program hosted by the Columbia community. The students came to learn about artificial intelligence (AI) but this program had a special twist – computer science (CS) and social work concepts were combined for a deeper, more meaningful look at AI.
“We created a space for young people to think critically about the social implications of artificial intelligence for the communities that they live in,” said Desmond Patton, the program co-director and associate professor of the School of Social Work. “We wanted them to understand how things like race, power, privilege and oppression can be baked into algorithms and their adverse effects on communities.”

The program participants, composed of 9th, 10th and 11th graders, are from racial and ethnic groups underrepresented in AI: Black, Hispanic, and Asian. Girls as well as youth from lower-income backgrounds were particularly encouraged to apply. For three weeks the students attended lectures, went on field trips to visit local companies (LinkedIn and Samsung) involved in the program, and visited other AI4All programs, like at Princeton University. Their work culminated in a final project which they presented to their classmates, mentors, and industry professionals.
“I believe that it is important to bring more ethics to AI,” said Augustin Chaintreau, the program co-director and a CS assistant professor. He sees ethics integrated into technical concepts and taught at the same time. Instead of learning about the social consequences and fixing it after, to solve an issue. Shared Chaintreau, “It shouldn’t be thought about just in passing but as a central part of why this is a tool and its implications.”
An interdisciplinary approach to AI was even part of how the classes were structured. Technical CS concepts, such as machine learning and Python, were taught in the morning by professors and student volunteers. While in the afternoon, guest speakers came to talk about their perspective to the day’s lesson. So, on the same day, students learned about supervised and unsupervised learning, and in the afternoon, someone who was formerly incarcerated described how the criminal policing that survey people on social media had a role in making a case against them.

“We were learning college courses meant to be taught in a month but for us it was just a couple of weeks and that was really impressive,” said Genesis Lopez, who is part of the robotics team at her school. Lopez loves robotics but works more on the mechanical side. She goes back to the team knowing how to use Python and is confident she can step up and code if needed. Continued Lopez, “I learned a lot but my favorite part was the people, we became a family.”
Kai-Fu Lee (B.S. ’83) included in WIRED’s anniversary issue for his work that brings humanity to artificial intelligence.
Artificial intelligence (AI) has seeped into the daily lives of people in the developed world. From virtual assistants to recommendation engines, AI is in the news, our homes and offices. There is a lot of untapped potential in terms of AI usage, especially in humanitarian areas. The impact could have a multiplier effect in developing countries, where resources are limited. By leveraging the power of AI, businesses, nongovernmental organizations (NGOs) and governments can solve life-threatening problems and improve the livelihood of local communities in the developing world.