[
About Me
|
Projects and Publications
|
Professional Activities
|
Teaching | Awards |
Software |
Links ]
About Me:
I've received my PhD degree from
Columbia University.
My research interests
include computer vision, machine learning, and robotics.
Projects and Publications:
|
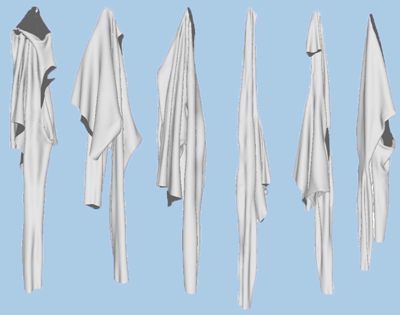 |
Model-Driven Feed-Forward
Prediction for Manipulation of Deformable Objects [arXiv]
[Database] [Simulation]
To appear in IEEE Transactions
on Automation Science and Engineering |
|
 |
Recognition and Manipulation of
Deformable Objects Using Predictive Thin Shell Modeling
[PDF]
Doctoral Thesis, Computer Science
Department, Columbia
University, Jan. 2016 |
|
 |
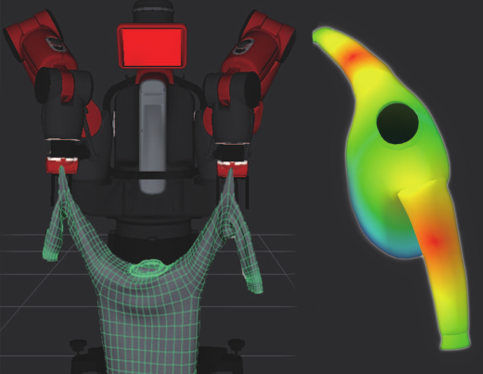
Multi-Sensor Surface Analysis For Robotic Ironing [arXiv] [slides] [video] [bibtex]
Y. Li,
X. Hu, D. Xu,
Y. Yue, E. Grinspun, and P. Allen
Proceedings of the IEEE
International Conference on Robotics and Automation (ICRA),
Stockholm, May 2016 |
|
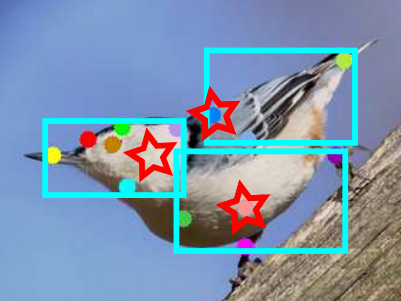 |
Articulated Pose Estimation
Using Hierarchical Exemplar-based Models [arXiv]
[slides] [bibtex]
J. Liu, Y. Li,
P. Allen, and P. Belhumeur
Proceddings of the AAAI Conference on Artificial Intelligence (AAAI),
Phoenix, Feb. 2016 |
|
 |
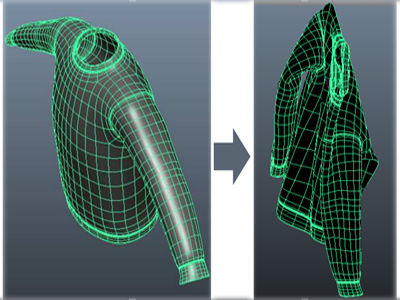
Folding Deformable Objects using
Predictive Simulation and Trajectory Optimization
[arXiv] [slides] [video]
[bibtex] [source
code]
Y. Li,
Y. Yue, D.Xu, E. Grinspun, and P. Allen
Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS),
Hamburg, Sept. 2015
|
|
 |
Regrasping and Unfolding of
Garments Using Predictive Thin Shell Modeling [PDF]
[slides] [video]
[bibtex]
Y. Li,
D. Xu, Y. Yue, Y. Wang, S-F Chang, E. Grinspun,
and P. Allen
Proceedings of the IEEE
International Conference on Robotics and Automation (ICRA),
Seattle, May 2015 |
|
 |
Part-Pair Representation for
Part Localization [PDF]
[poster] [bibtex]
J. Liu, Y. Li, and P. Belhumeur
Proceedings of the 13th European
Conference on Computer Vision (ECCV), Zurich, Sept.
2014 |
|
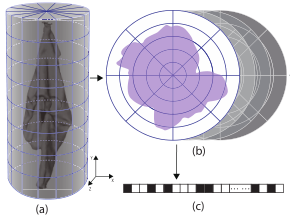 |
Real-time Pose Estimation of
Deformable Objects Using a Volumetric Approach
[PDF] [slides]
[videos] [bibtex]
[source
code]
Y. Li*, Y. Wang*,
M. Case, S-F Chang, and P. Allen (* equal
contribution)
Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS),
Chicago, Sept. 2014
|
|
 |
Recognition of Deformable Object
Category and Pose [PDF]
[slides] [videos]
[bibtex]
Y. Li,
C-F Chen, and P. Allen
Proceedings of the IEEE
International Conference on Robotics and Automation (ICRA),
Hong Kong, June 2014 |
|
 |
Hair Transplant Delivery System
(The first fully automatic surgery robot to harvest hair
follicular units) [Intro]
[Demo1]
[Demo2]
---fiducial recognition and
tracking for hair harvest tensioner using visual servoing
---Stäubli
robot (TX 60) manipulation and 3D object recognition using
visual perception by stereo cameras
---3D harvest plane registration
for implantation on scalp with sparse hairs in site-making
module
|
|
 |
Hair Treatment Planning System (A
software for rapid treatment planning of hair restoration for
patients)
---3D head reconstruction and 3D
hair modeling using SlimDX (a wrapper of DirectX)
---feature detection and image
calibration using OpenCV
---system IO and UI design |
|
 |
Segmentation of Floors in
Corridor Images for Mobile Robot Navigation
[PDF] [Hard
Copy on Amazon] [bibtex]
Yinxiao Li
Clemson University, M.S.
Thesis, AAT-1498356, 2011 |
|
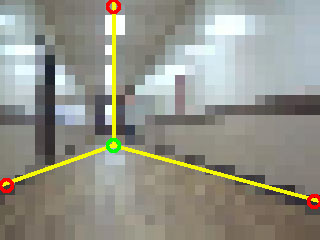 |
Extracting Minimalistic Corridor
Geometry from Low-Resolution Images
[PDF]
[slides]
[videos]
[bibtex]
Y. Li,
V. Murali, and S. Birchfield
Proceedings of International
conference on Intelligent Robotics and Applications (ICIRA),
Montreal, Canada, Oct. 2012 |
|
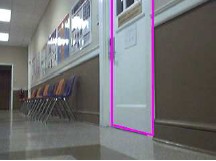 |
Visual Detection of
Lintel-Occluded Doors by Integrating Multiple Cues Using
Data-Driven Markov Chain Monte Carlo Process
[PDF]
[videos]
[dataset] [bibtex]
Z.
Chen, Y. Li, and S. Birchfield
Journal of Robotics and Autonomous Systems (RaS),
59(11): 966-976, Nov. 2011 |
|
 |
Image-Based Segmentation
of Indoor Corridor Floors for a Mobile Robot
[PDF]
[slides]
[videos]
[bibtex]
Y.
Li
and S. Birchfield
Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS),
Taipei, Taiwan, Oct. 2010 |
|
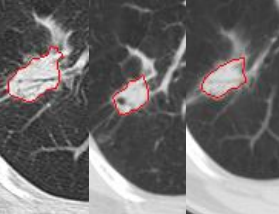 |
Reproducibility of
Computer-aided Volume Measurements on Same-day Repeat CT Scans
Reconstructed with Different Imaging Parameters [PDF]
B. Zhao, H-J Lee,
Y. Tan,
Y. Li, A. Hazlett, L. Schwartz
97th Scientific Assembly and
Annual Meeting -Radiological Society of North America (RSNA),
McCormick, Chicago, Nov. 2011 |
|
 |
Exploring the
Reproducibility of Tumor Volumes Measured by Radiologist,
Computer-aided Radiologist and Computer Alone
[PDF]
[poster]
B. Zhao, Y. Tan,
Y. Li, P. Guo, and L. Schwartz
Medical Physics, 38:3494, June 2011 |
Professional Activities
-
Reviewer, Autonomous Robot
-
Reviewer, Journal of Neurocomputing
-
Reviewer, IEEE Transactions on Robotics
-
Reviewer, IEEE Robotics and Automation
Letters (RA-L)
-
Reviewer,
International Journal of Advanced Robotics
Systems (IJARS)
-
Reviewer, IEEE
International Conference on Robotics and Automation (ICRA), 2012-2016
-
Reviewer, IEEE
International Conference on Intelligent Robots and Systems
(IROS), 2012-2016
-
Reviewer,
International Conference on Intelligent Robotics and Applications
(ICIRA), 2012
Teaching
Assistant
-
Computational
Aspects of Robotics, Columbia University, Fall 2014, Fall
2013
-
Introduction to Programming in C,
Columbia University, Summer 2013
-
Digital Image Processing, Clemson
University, Fall 2010
-
Computer Vision, Clemson
University, Spring 2010
Awards
-
NSF Student Travel Grant award for
IROS 2015 in Hamburg
-
RAS Travel Grant award for ICRA
2015 in Seattle
-
NSF Student Travel Grant award for
IROS 2014 in Chicago
-
NSF Student Travel Grant award for
ICRA 2014 in Hong Kong
-
Graduate Instructional Support
Assistantship at Clemson University, 2011
-
U.S. National Cooperative Highway
Research Fellowship, 2010
Software
-
Bond Yield Calculator (Written in
C#, an easy-to-use calculator for bond holder, etc.) [download]
-
Fast Parallel Skeletonization
(Written in C using Blepo computer vision library. You can
rewrite using OpenCV easily.) [download]
Links
©2009-2016, Yinxiao Li. All rights
reserved
Last updated: Feb. 2016 |