Yinxiao Li and Stan Birchfield
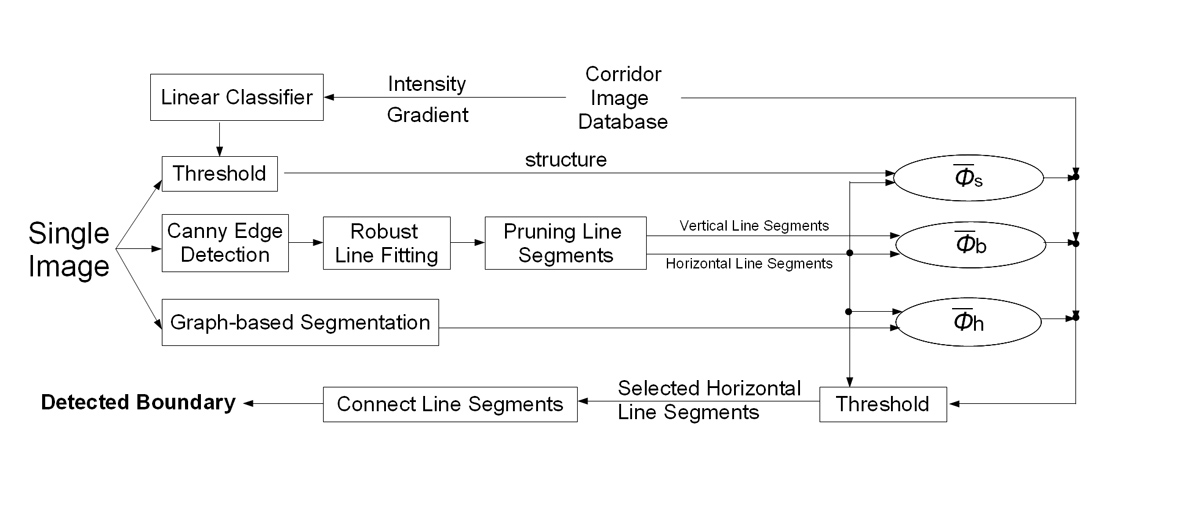
We present a novel method for image-based floor detection from a single grayscale image. In contrast with previous approaches that rely upon homographies, our approach does not require multiple images (either stereo or optical flow). It also does not require the camera to be calibrated, even for lens distortion. The technique combines three visual cues for evaluating the likelihood of horizontal intensity edge line segments belonging to the wall-floor boundary. The combination of these cues yields a robust system that works even in the presence of severe specular reflections, which are common in indoor environments. The nearly real-time algorithm is tested on a large database of images collected in a wide variety of conditions, on which it achieves nearly 90% detection accuracy.
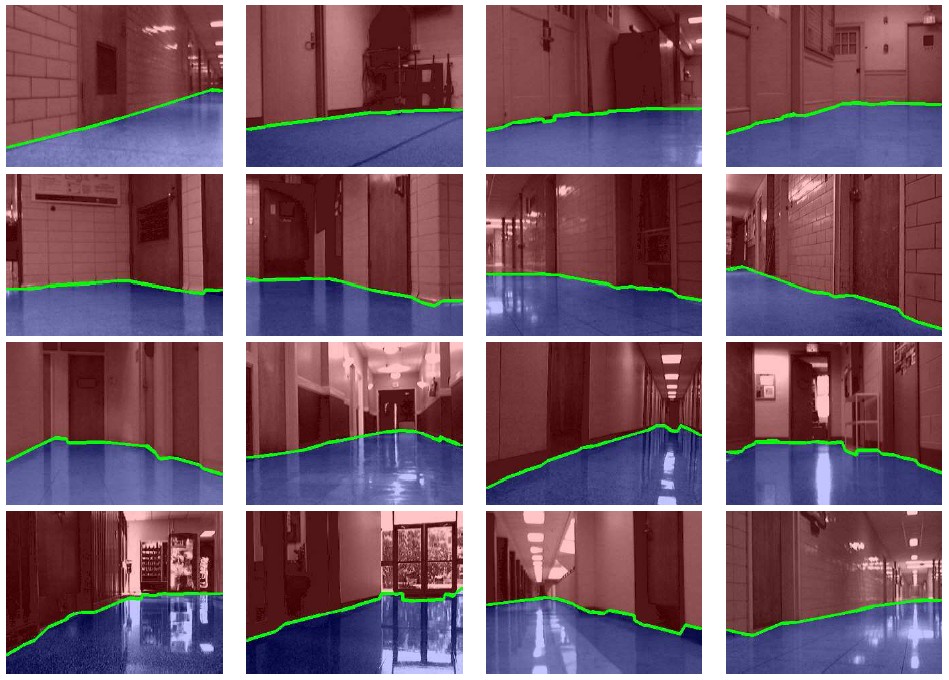
Below are shown results of the algorithm on a variety of images. The first row displays wall-floor boundaries that extend upward from left to right in the image, while the second row shows the reverse situation. In the third row, both sides of the corridor are visible, so that the boundary extends in both directions. And the fourth row shows floors with extremely strong reflections on the floor, where the floor and wall are again distinguished using only low-level information. From these results, we can see that our approach is capable of detecting floors in corridors under different illumination conditions and perspectives.
Videos:
These videos include mild temporal smoothing to reduce visual jitters.
|
AVI Video Clip |
Description |
|
4023KB |
Despite the texture on the wood floor, our algorithm is able to correctly detect the wall-floor boundary. |
|
2377KB |
The floor contains strong reflections of the ceiling lights and texture on the wall. |
|
1603KB |
Very strong reflection on the floor and dark environment. |
|
2295KB |
Checkered floor causes trouble in selecting the correct line segments. |
|
2928KB |
This is a corridor structure with an appearance significantly different from the others. |
|
2030KB |
Regular corridor scene with several sharp turnings. |
Yinxiao Li and Stan Birchfield, Image-Based Segmentation of Indoor Corridor Floors for a Mobile Robot, Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, October 2010.
(back)





