Laundry Robot
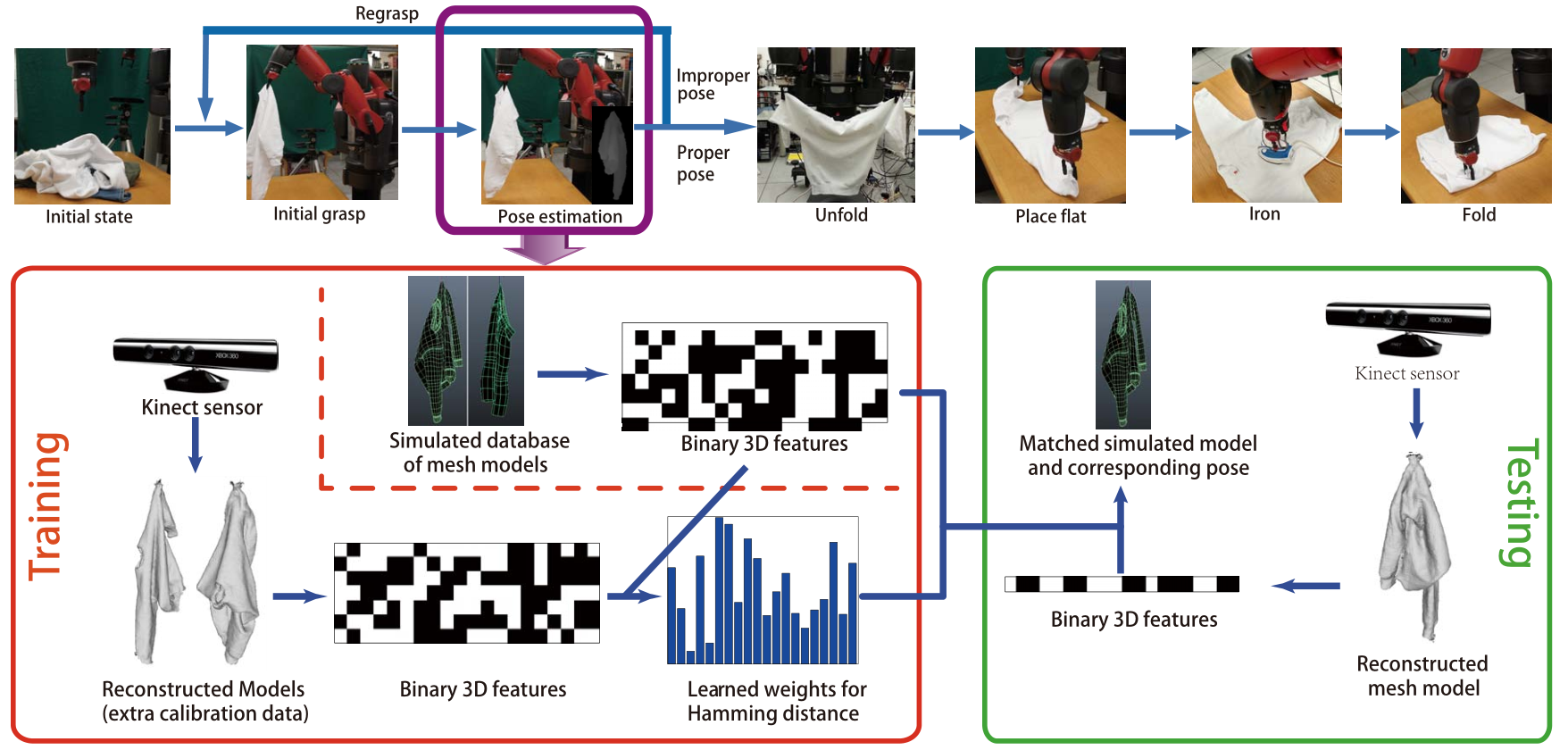
Real-time Pose Estimation of Deformable Objects Using a Volumetric Approach
Yinxiao Li, Yan Wang, Michael Case, Shih-Fu Chang, Peter K. Allen
Abstract
Pose estimation of deformable objects is a fundamental and challenging problem in robotics. We present a novel solution to this problem by first reconstructing a 3D model of the object from a low-cost depth sensor such as Kinect, and then searching a database of simulated models in different poses to predict the pose. Given noisy depth images from 360- degree views of the target object acquired from the Kinect sensor, we reconstruct a smooth 3D model of the object using depth image segmentation and volumetric fusion. Then with an efficient feature extraction and matching scheme, we search the database, which contains a large number of deformable objects in different poses, to obtain the most similar model, whose pose is then adopted as the prediction. Extensive experiments demonstrate better accuracy and orders of magnitude speedup compared to our previous work. An additional benefit of our method is that it produces a high-quality mesh model and camera pose, which is necessary for other tasks such as regrasping and object manipulation.
Links
[paper] [slides] [bibtex] [source code]
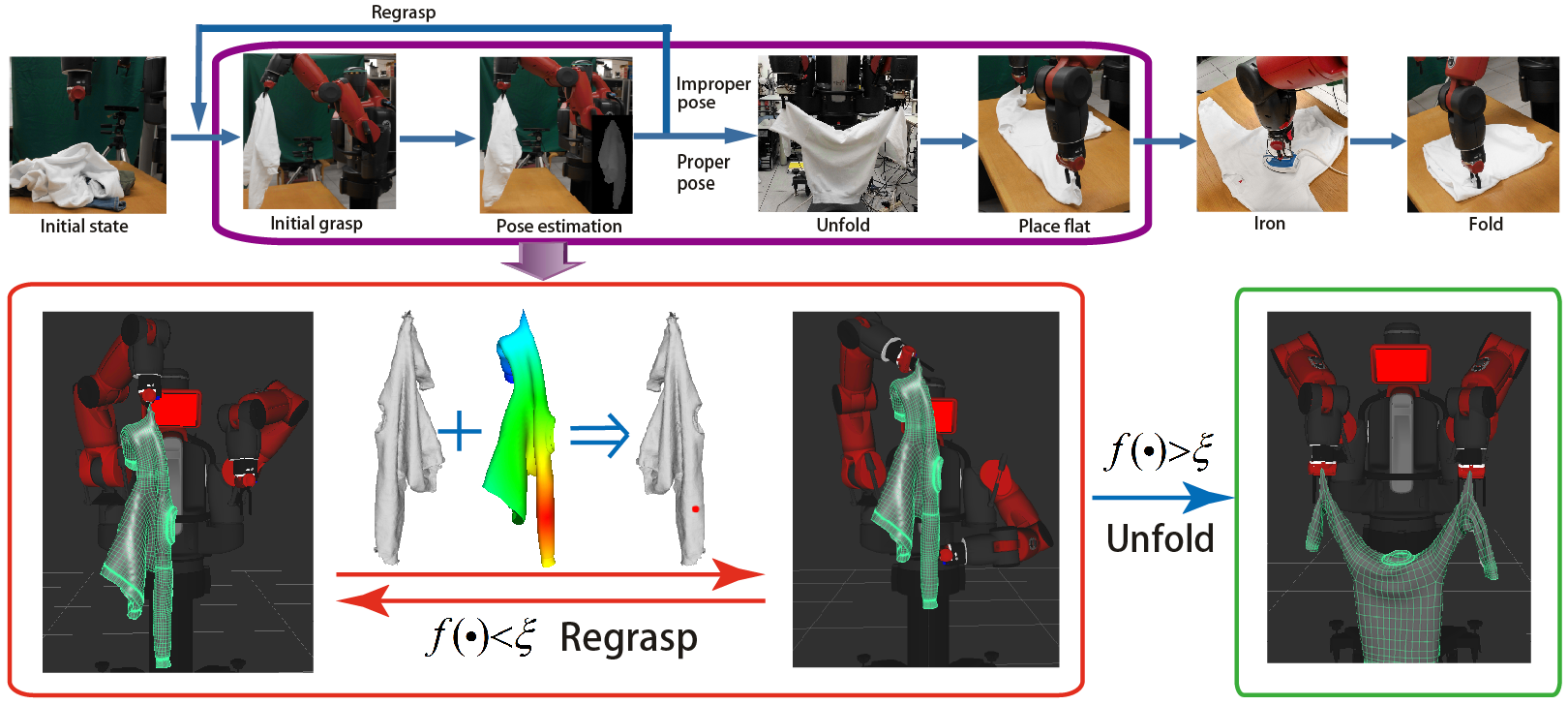
Regrasping and Unfolding of Deformable Garments Using Predictive Thin Shell Modeling
Yinxiao Li, Danfei Xu, Yonghao Yue, Yan Wang, Shih-Fu Chang, Eitan Grinspun, Peter K. Allen
Abstract
Deformable objects such as garments are highly unstructured, making them difficult to recognize and manipulate. In this paper, we propose a novel method to teach a two arm robot to efficiently track the states of a garment from an unknown state to a known state by iterative regrasping. The problem is formulated as a constrained weighted evaluation metric for evaluating the two desired grasping points during regrasping, which can also be used for a convergence criterion The result is then adopted as an estimation to initialize a regrasping, which is then considered as a new state for evaluation. The process stops when the predicted thin shell conclusively agrees with reconstruction. We show experimental results for regrasping a number of different garments including sweater, knitwear, pants, and leggings, etc.
Links
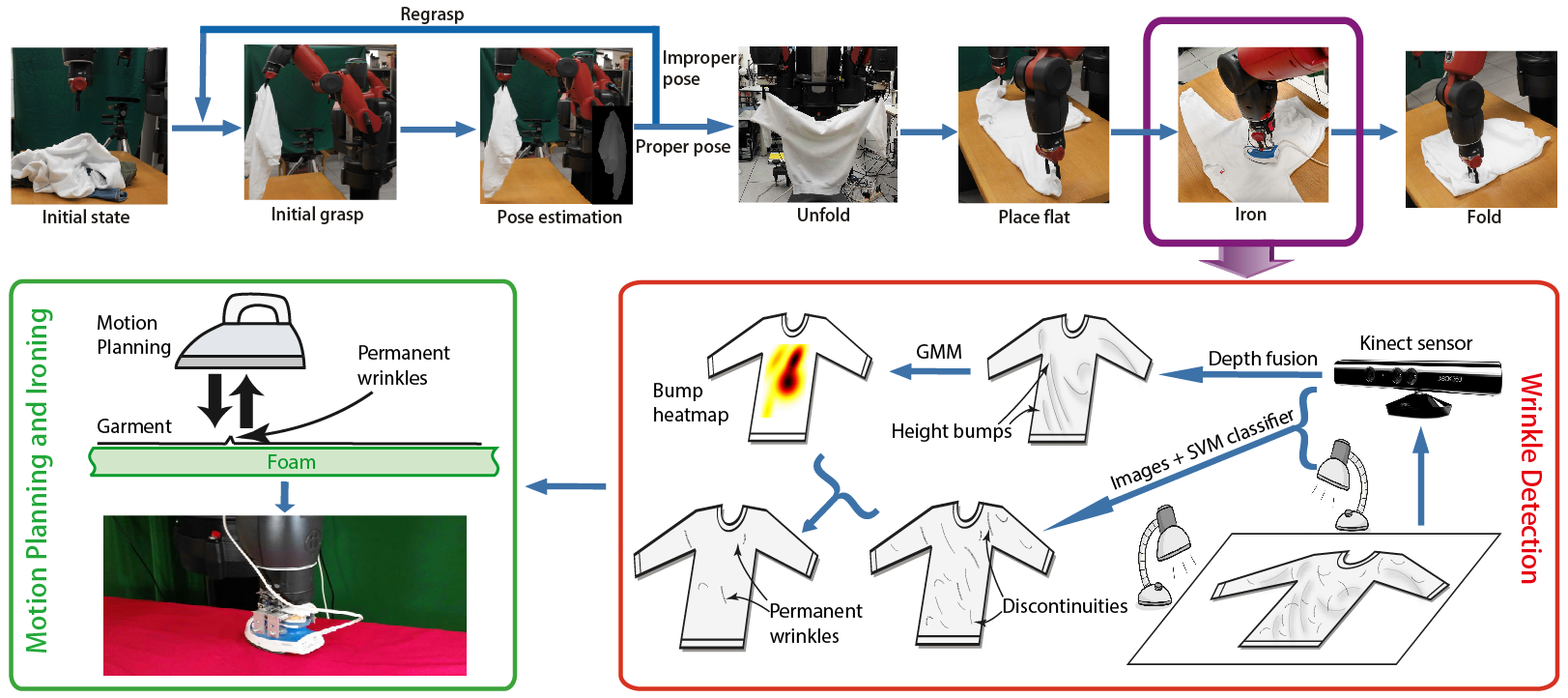
Multi-Sensor Surface Analysis For Robotic Ironing
Yinxiao Li, Xiuhan Hu, Danfei Xu, Yonghao Yue, Eitan Grinspun, Peter K. Allen
Abstract
Robotic manipulation of deformable objects remains a challenging task. One such task is to iron a piece of cloth autonomously. Given a roughly flattened cloth, the goal is to have an ironing plan that can iteratively apply a regular iron to remove all the major wrinkles by a robot. We present a novel solution to analyze the cloth surface by fusing two surface scan techniques: a curvature scan and a discontinuity scan. The curvature scan can estimate the height deviation of the cloth surface, while the discontinuity scan can effectively detect sharp surface features, such as wrinkles. We use this information to detect the regions that need to be pulled and extended before ironing, and the other regions where we want to detect wrinkles and apply ironing to remove the wrinkles. We demonstrate that our hybrid scan technique is able to capture and classify wrinkles over the surface robustly. Given detected wrinkles, we enable a robot to iron them using shape features. Experimental results show that using our wrinkle analysis algorithm, our robot is able to iron the cloth surface and effectively remove the wrinkles.
Links
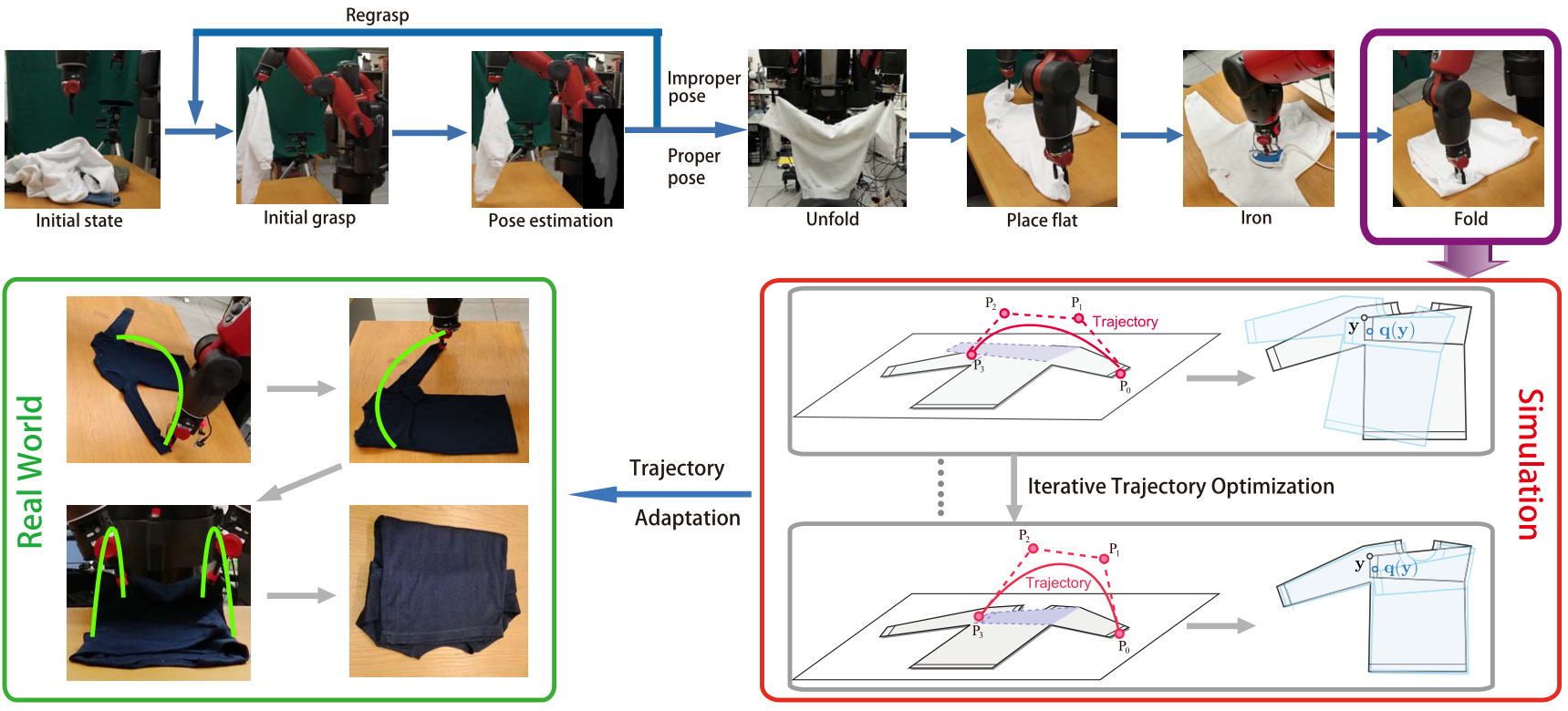
Folding Deformable Objects using Predictive Simulation and Trajectory Optimization
Yinxiao Li, Danfei Xu, Yonghao Yue, Yan Wang, Shih-Fu Chang, Eitan Grinspun, Peter K. Allen
Abstract
Robotic manipulation of deformable objects remains a challenging task. One such task is folding a garment autonomously. Given start and end folding positions, what is an optimal trajectory to move the robotic arm to fold a garment? Certain trajectories will cause the garment to move, creating wrinkles, and gaps, other trajectories will fail altogether. We present a novel solution to find an optimal trajectory that avoids such problematic scenarios. The trajectory is optimized by minimizing a quadratic objective function in an off-line simulator, which includes material properties of the garment and frictional force on the table. The function measures the dissimilarity between a user specified folded shape and the folded garment in simulation, which is then used as an error measurement to create an optimal rajectory. We demonstrate that our two-arm robot can follow the optimized trajectories, achieving accurate and efficient manipulations of deformable objects.
Links
[arXiv] [slides] [bibtex] [source code]
Recognition
Unfolding
Ironing
Folding