Research
Learning Grasp Stability via Tactile Sensing
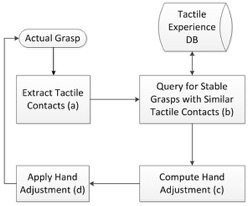
Tactile Experience-based Stable Grasping Control
Stable grasps are successful grasping experience and can be used as hints in a stable grasp exploration process. With a large amount of stable grasping data, hand adjustments can be synthesized from stable grasps and their corresponding tactile feedback, which drive the exploration process.
-
-Hao Dang and Peter K. Allen, Tactile Experience-based Robotic Grasping, Workshop on Advances in Tactile Sensing and Touch based Human-Robot Interaction, 7th ACM/IEEE International Conference on Human-Robot Interaction(HRI), 2012, Boston. [pdf, bib]
-
-Hao Dang and Peter K. Allen, Stable Grasping under Pose Uncertainty Using Tactile Feedback, Autonomous Robots, 2013.[url, bib]
-
-Hao Dang and Peter K. Allen, Grasp Adjustment on Novel Objects Using Tactile Experience from Similar Local Geometry, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 3-7, 2013, Tokyo, Japan. [pdf, bib]
Functional Analysis of Finger Contacts during Grasping
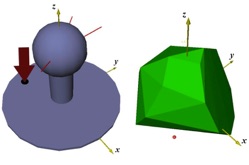
Applying robotic grasp quality analysis to human grasping data, we look into how a particular choice of contact point distribution affects the subjects’ ability to resist external forces applied to the grasped object, which helps understand human choices of finger contact locations during grasping actions.
- Matei Ciocarlie, Hao Dang, Jamie Lukos, Marco Santello, Peter Allen, Functional Analysis of Finger Contact Locations during Grasping Third Joint EUROHAPTICS Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, March 18-20, 2009, Salt Lake City. [pdf, bib]
Modeling Object Manipulation Tasks
Through observations, we see many manipulations involved in many everyday object tasks can be considered as a series of sequential rotations and translations. These basic trajectories can be considered as manipulation primitives and be used to design a task description framework.
- Hao Dang and Peter K. Allen, Robot Learning of Everyday Object Manipulations via Human Demonstration, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 18-22, 2010, Taipei. [pdf, bib]
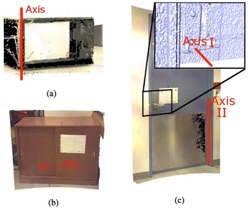
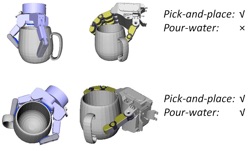
Semantic Grasping
Stability is not the only criterion for a grasp to be useful. Task related (semantic) constraints should be considered during grasp planning. These constraints can be embedded into i) the local geometry of the object from the approaching direction, ii) the hand posture, and iii) the hand tactile contact with the object. Using this embedding, grasp planning with different task constraints can be facilitated.
-
-Hao Dang and Peter K. Allen, Semantic Grasping: Planning Robotic Grasps Functionally Suitable for An Object Manipulation Task , IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 7-11, 2012, Algarve. [pdf, bib]
-
-Hao Dang and Peter K. Allen, Semantic Grasping: Planning Task-Specific Stable Robotic Grasps, Autonomous Robots, 2014. [url, bib]
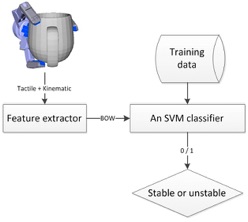
Estimating the stability of a grasp before a robot lifts up an object for the next action would be beneficial. The stability of a grasp can be learned based on tactile and hand kinematic data. In this research, it is shown that the stability classifier learned based on simulation data can be transferred to physical grasping with a reasonably good performance.
-
-Hao Dang and Peter K. Allen, Learning Grasp Stability, IEEE Conference on Robotics and Automation (ICRA), May 14-18, 2012, St. Paul. [pdf, bib]
- Hao Dang, Jonathan Weisz, and Peter K. Allen, Blind Grasping: Stable Robotic Grasping Using Tactile Feedback and Hand Kinematics, IEEE Conference on Robotics and Automation (ICRA), May 9-13, 2011, Shanghai. [pdf, bib]