Research Projects
View Planning for Automated Site Modeling
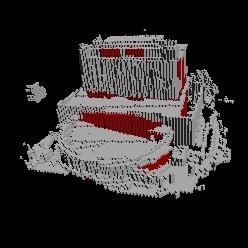 |
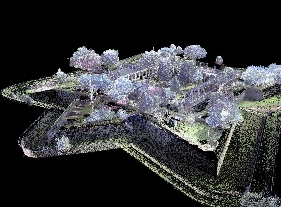
We present a systematic method for constructing 3-D
models of large indoor and outdoor sites. The method is designed
for a mobile robot platform and incorporates automated acquisition
of scanned data as well as automated view planning and model
construction. In our modeling process, we first use a preliminary
view or set of preplanned views to yield an initial, approximate,
3-D model of the target structure. Then, we update this model by
using a voxel-based procedure to plan and acquire the next best
view. This updating is repeated sequentially until an accurate and
complete 3-D model is finally obtained. The method has been
successfully tested on a portion of the Columbia University campus,
Fort Jay at Governors Island, and several churches in the
Bourbonnais region of France.
|
 |
Candidacy Exam - View Planning
 |
For my PhD candidacy
exam at Columbia University I presented a survey of the state
of the art in view planning literature.
|
Topological Localization for Mobile Robots
 |
We developed a system for topologically localizing mobile
robots. The first part of the system performs localization by
matching multiresolution histograms of omnidirectional images to a
database. The second reinforces the location estimate by matching
measured wireless signal strengths measurements with a signal map
of a known wireless network.
|
3D Desktop Photography
 |
We implemented 3D Photography on Your Desk, originally done by
Jean-Yves Bouguet and Pietro Perona at Caltech. The goal of this
system is to provide a simple and inexpensive way to extract the 3D
shape of objects, using weak structured lighting. The only hardware
necessary here is a video camera (with host computer), a
checkerboard, a desk lamp and a pencil. Using the shape of the
shadow cast by the pencil, the system should extract 3D points
corresponding to the surface of the object over which the shadow
passes.
|
Robot Path Planning Using Generalized Voronoi Diagrams
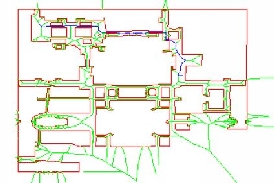 |
I implemented an efficient and robust algorithm for computing
safe paths for a mobile robot. I have specifically designed the
algorithm for use in the Autonomous
Vehicle for Exploration and Navigation in Urban Environments
(AVENUE) project. I use an approach based on the generalized
Voronoi diagram for a planar region with specified obstacles. Once
this diagram has been constructed, I can search it to find robot
paths that pass, with maximal clearance, around the obstacles.
|
Autonomous Vehicle for Exploration and Navigation in Urban
Environments (AVENUE)
 |
AVENUE stands for Autonomous Vehicle for Exploration and
Navigation in Urban Environments. The goal of this project is to
create an autonomous system capable of building photo-realistic 3D
geometrically accurate models of outdoor sites. In my early career
at Columbia I worked on various low level parts of this project
including GPS and camera integration. Many of my later projects
all tie back into this project including the path planner and my
thesis topic, the view planner.
|