Regrasping and Unfolding of Garments Using Predictive Thin Shell Modeling
Yinxiao Li, Danfei Xu, Yonghao Yue, Yan Wang, Shih-Fu Chang, Eitan Grinspun, Peter K. Allen
Columbia University
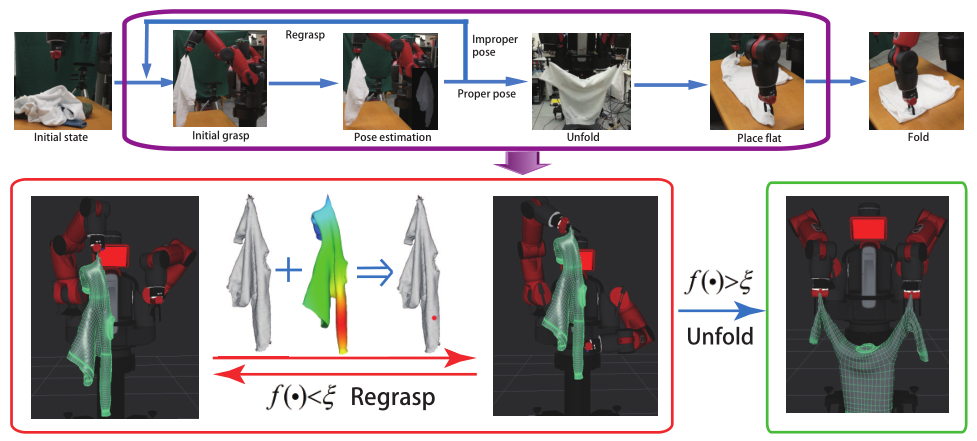
Deformable objects such as garments are highly unstructured, making them difficult to recognize and manipulate. In this paper, we propose a novel method to teach a twoarm robot to efficiently track the states of a garment from an unknown state to a known state by iterative regrasping. The problem is formulated as a constrained weighted evaluation metric for evaluating the two desired grasping points during regrasping, which can also be used for a convergence criterion The result is then adopted as an estimation to initialize a regrasping, which is then considered as a new state for evaluation. The process stops when the predicted thin shell conclusively agrees with reconstruction. We show experimental results for regrasping a number of different garments including sweater, knitwear, pants, and leggings, etc.
Keywords:Robotics, garment, regrasping, unfolding
Proc. IEEE ICRA 2015, pp.1382-1388. Seattle, May 2015
Paper: PDF(5.2MB)Video: VIDEO(YouTube)