
current position:
doctoral advisor:
email (still active):
Assistant Professor, Columbia University
Prof. Peter Allen
| Dr. Matei Ciocarlie | ||
|
current position:
doctoral advisor:
email (still active):
|
Ph.D.
Graduate Assistant Professor, Columbia University Prof. Peter Allen |
|
|
||
| Doctoral Thesis |
|
  |
My thesis introduces new methods for enabling the effective use of
highly dexterous robotic hands, interfacing with the upcoming
generation of neurally controlled hand prostheses, and designing a new
class of simple yet effective grasping devices based on underactuation
and mechanical adaptation. These methods share a common goal: reducing
the complexity that has traditionally been associated, at both
computational and mechanical levels, with robotic grasping in
unstructured environments. In this thesis, we propose using low-dimensional posture subspaces for dexterous or anthropomorphic hands. Human user studies have shown that most of the variance in hand posture for a wide range of grasping tasks is contained in relatively few dimensions. We extend these results to a range of robotic designs, and introduce the concept of eigengrasps as the bases of a low-dimensional, linear hand posture subspace. We then show that a grasp synthesis algorithm that optimizes hand posture in eigengrasp space is both computationally efficient and likely to yield stable grasps. Algorithmic approaches to low-dimensional grasping can enable computationally effective algorithms and interaction models. Hardware implementations have the potential to reduce the mechanical complexity and construction costs of a hand design, using concepts such as underactuation and passive mechanical adaptation. Instead of complex run-time algorithms, hand models in this class use design-time analysis to improve performance over a spectrum of tasks. Along these directions, we present a set of analysis and optimization tools for the design of low-dimensional, underactuated hands. We focus on tendon-based mechanisms featuring adaptive joints and compliant fingertips, and show how a number of design parameters, such as tendon routes or joint stiffnesses, can be optimized to enable a wide range of stable grasps.
|
| Selected Projects |
|
| Low dimensional hand control using
Eigengrasps |
|
 |
One difficulty in understanding
human hand control is the large number of degrees of freedom (DOFs)
involved. This flexibility gives rise to an enormous set of possible
hand configurations. The high dimensionality of the control space also
explains the difficulty in creating effective control algorithms for
all but the simplest artificial hand designs. One possible explanation for human efficiency in selecting appropriate grasps assumes that humans unconsciously simplify the large search space through learning and experience. Recent advances in neuroscience research have shown that control of the human hand during grasping is indeed dominated by movement in a configuration space of highly reduced dimensionality. In my work, I extend this concept to robotic hands and show how a similar dimensionality reduction can be defined using a number of basis vectors called eigengrasps. This framework can be used to derive optimization algorithms that simplify the task of finding stable grasps even for highly complex hand designs. Furthermore, it offers a unified approach for controlling different hands, even if the kinematic structures of the models are significantly different.
|
| Optimization of underactuated hand designs |
|
 |
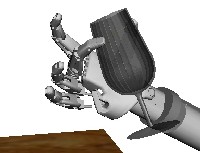
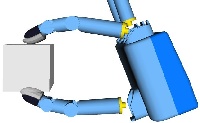
We present a method for analysis and
optimization of tendon-based underactuated adaptive hands. We have
integrated the co-actuation and compliance constraints, together with
contact friction constraints, into a quasistatic equilibrium
formulation. Using this model, we can build a solvable optimization
problem to compute the hand design parameters that provide the best
performance over a large set of grasping tasks. We believe that, for
the class of adaptive underactuated hands, the on-line grasp planning
effort, traditionally carried out under tight time constraints and
requiring extensive sensing capabilities, can be replaced by off-line
optimization increasing hand performance over many grasping
scenarios. As a concrete example, we have analyzed a simplified
single-tendon gripper model, and have used the results of the
optimization to construct a prototype capable of a wide range of
grasps.
|
| Grasping and manipulation using soft
fingertips |
|
   |
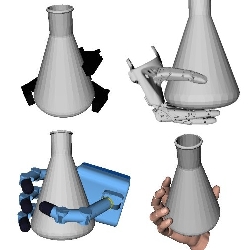
The ability to create stable,
encompassing grasps with subsets of fingers is greatly increased by
using soft fingertips that deform during contact and apply a larger
space of frictional forces and moments than their rigid counterparts.
This is true not only for human grasping, but also for robotic hands
using fingerpads made of soft materials. Here are examples
of dynamic
simulations of an anthropomorphic hand using soft fingertips for
performing manipulation tasks. In order to achieve
computational rates
needed for dynamic simulation, I am using an analytical soft finger
model that uses general expressions for non-planar contacts of elastic
bodies
to account for the local geometry and structure of the bodies in
contact.
|
| GraspIt! | |
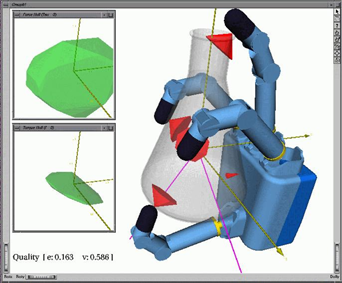 |
I am currently using and
continuing to develop the GraspIt! simulator, originally
built by Andrew Miller in the Robotics Lab at Columbia. This allows all
the methods and tools presented above to be assembled into a complete
computational model of a given grasping mechanism. Iterative
refinements can be added to the models as we develop new insights into
both robotic and human grasping. Development of the tools proposed in
my research is aimed towards accurate modeling of new and/or more
complex hand designs, including the human hand. Furthermore, GraspIt! can serve as a test bed
for performing functional comparisons between such models. GraspIt! is currently available for download. The publicly available release does not include support for soft fingertips or human hand models, however it has a large number of features extremely useful for grasp analysis and simulation. If you are already using this simulator and have any questions regarding it, or need help with particular aspects of the code, you can send me an email and I will do my best to provide support. |
| Physical-based
dynamic simulation |
|
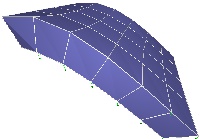   |
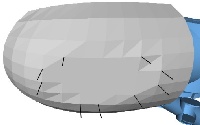
I have developped a Finite
Element Method based engine for dynamic simulation of deformable
objects (top image shows this engine used to compute the deformation of
a box-shaped object under the effect of gravity). This software can be
used as a C++ library, and also as a stand-alone application as it
includes an OpenGL-based visualization component. The engine can
currently use three simulation methods:
|
| Computational tools for modeling and
visualizing historic and archaeological sites |
|
 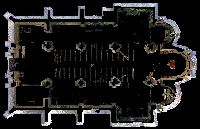 |
Recent technological advances
have greatly facilitated the process of obtaining
digital data characterizing historical and archaeological sites. My
interest is in using high resolution range scanners for capturing the
three-dimensional structure of historical buildings. As a member of the
Romanesque Churches of the Bourbonnais
project, I have worked on acquiring complete three dimensional models
of eight 12th century churches in the Bourbonnais region of France.
These models, acquired using a Leica range scanner and a digital
theodolyte, contain up to 15 mil. points for each building and can be
used for visiting and studying the churches in virtual reality
environments. Since both the interior and exterior of the building can
be scanned and registeres into a single coordinate system, these models
enable the creation of complete floor plans and cross sections, wich
can also be used for studying the structural faults of the buildings. |