| Abstract |
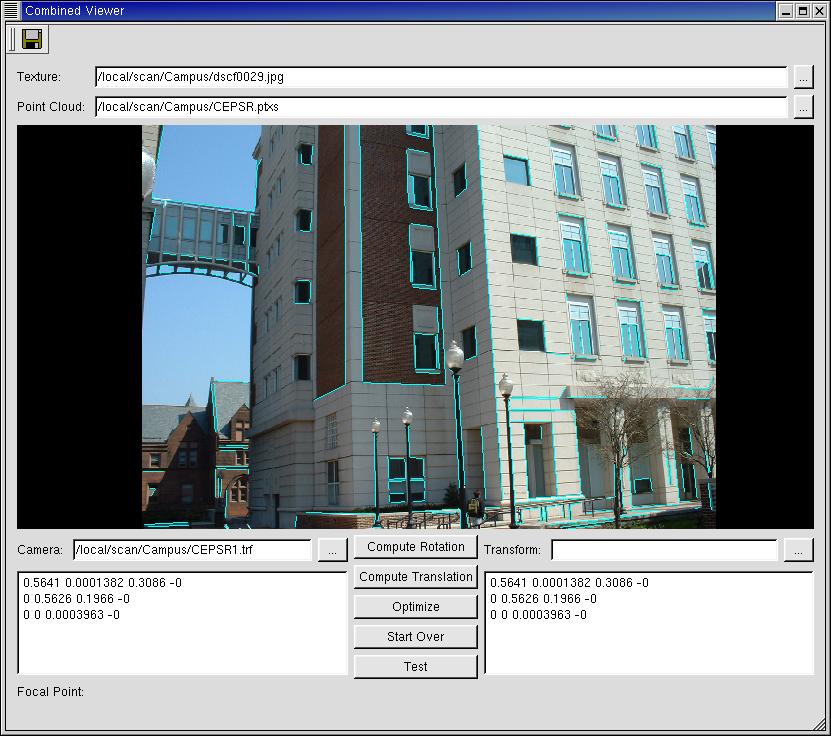
This is a software tool for image to geometry registration that
uses extracted 2D and 3D lines as features to compute the camera
position. The tool takes as input an image and a point cloud.
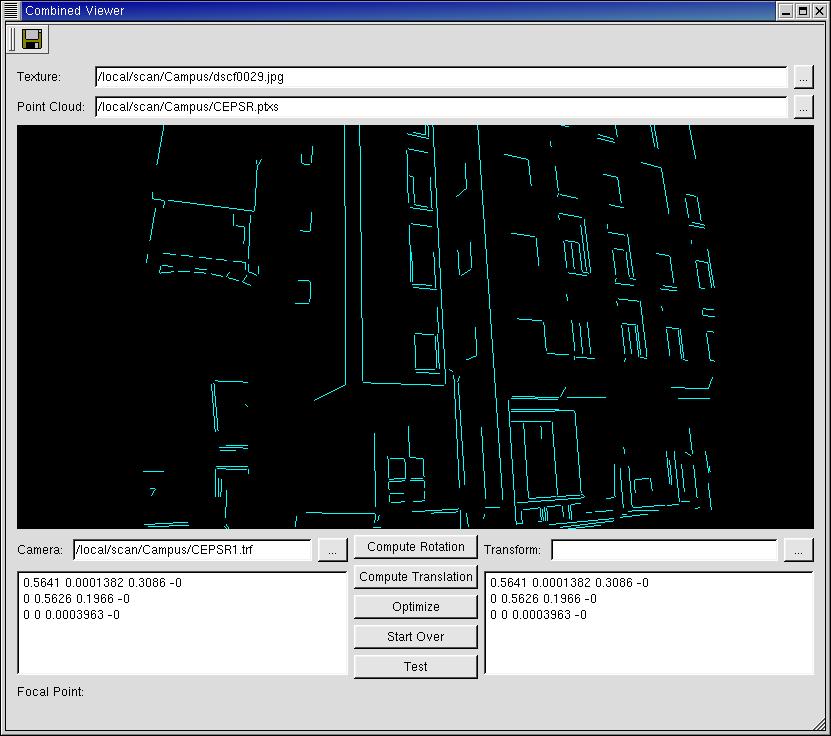
Lines in the image are extracted using an edge detector and fitting
lines to the edge elements. To extract 3D lines, I use previous work
on planar segmentation of point clouds.
(get related paper)
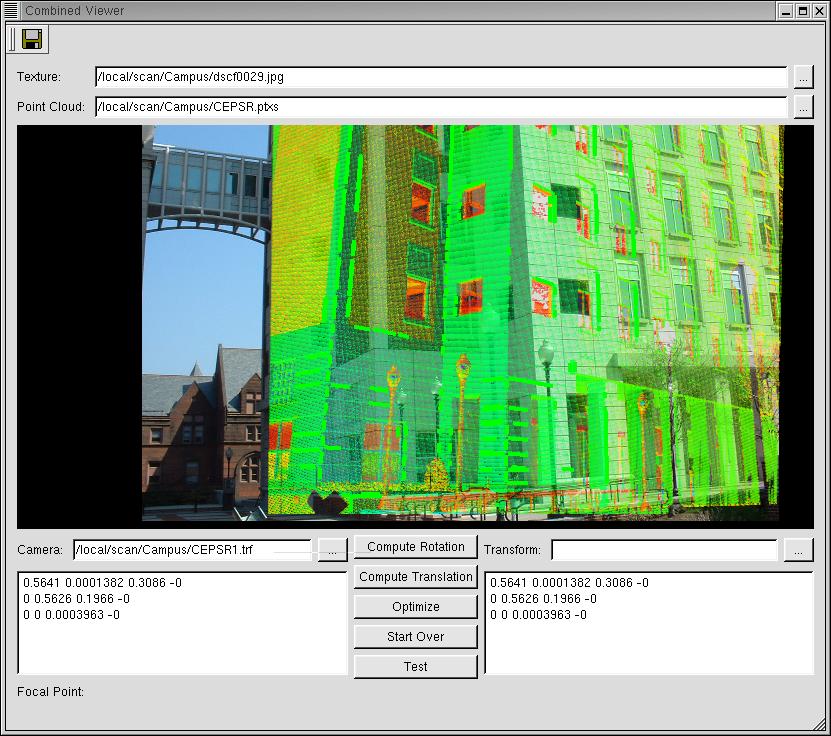
After the lines are extracted, they are clustered in groups
of parallel lines. Then, by automatically matching corresponding line clusters,
the rotation of the camera is computed. The final step is to compute
the translation. At this point, the user drags the correctly oriented
model over the image until it is placed close the the correct position.
A closest line search is started, looking for pairs of matching lines
and computing the translation.
View video of registration in action: Video (11.2Mb)