![]()
A number of independent projects for graduate and undergraduate students are available in the robotics and vision laboratory. Most of these projects require a working knowledge of UNIX and C, C++ or Java. Experience in graphics, user interfaces, computer vision or robotics is also very desirable. Students will be expected to work independently under the guidance of Professor Allen or a Ph.D. student. Projects involve using state-of-the art computer systems and robotic devices in the robotics and vision laboratory. Equipment in the lab includes include 2 RWI Pioneer Mobile Robots, an RWI ATRV2 mobile outdoor base, 2 Unimation PUMA 560 Robot Arms, 1 IBM 7575 Robot Arm, a Utah-MIT Robot Hand, a custom built overhead XYZ gantry robot, a Toshiba FMA manipulator, a Barrett Technology robotic hand, frame grabbers and imaging boards,8 SUN SPARCstations, Silicon Graphics Indigo 2 Extreme, and numerous PCs.
Interested students should contact Professor Allen in 619 CEPSR, 939-7093 or electronically at allen@cs.columbia.edu. Additional information is available at Robotics Lab Page
Below are some projects currently available in our laboratory. Students with interests other than those below are encouraged to discuss their ideas with Prof. Allen.
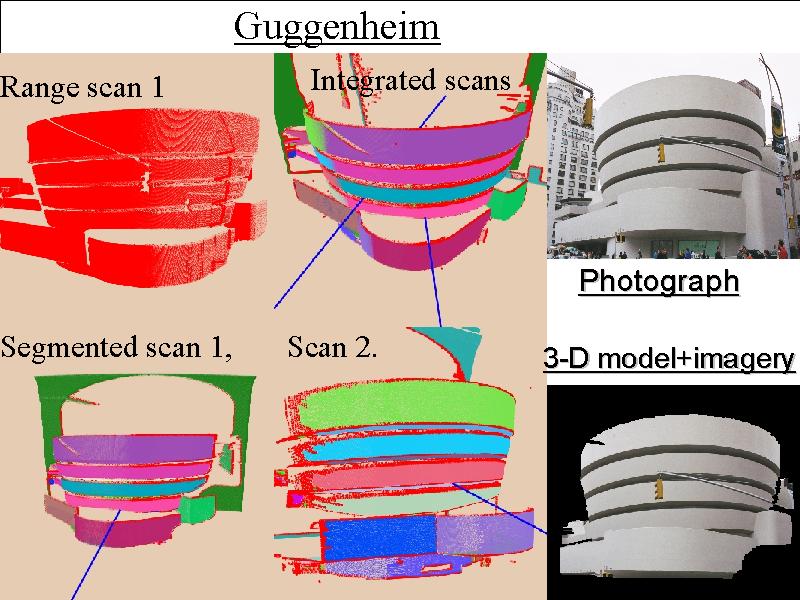
Figure: Skyscraper models built from scanning laser range finder
In this project, we are extending our earlier work in Solid Model Construction from Range Imagery to build large outdoor structures sucha s buildings. Projects involve merging partial scans of buildings to create a complete scan. Details can be found here. The scans we are currrently merging are from Beauvais Cathedral in France.


Figure: Beauvais Cathedral and Laser Range scan of Cathedral
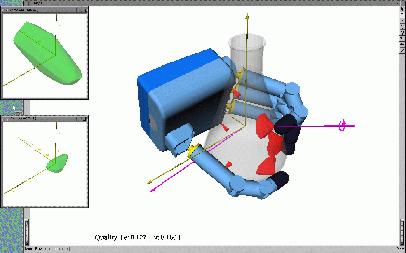
This project is part of a multi-institution, multi-year, NIH grant in Structural Genomics that created the NorthEast Structural Genomics Consortium This research is aimed at using vision to provide the compliance and robustness which precise protein manipulations require without the need for extensive analysis of the physics of grasping or a detailed knowledge of the environment. Tasks include visually isolating individual proteins in a culture, recovering 3-D depth models of isolated proteins, and using online visual servoing techniques to grasp and manipulate the proteins. The project team consists of researchers in Computer Science, Biomedical Engineering and Biology.
A short description of the project is available in PDF Format or in HTML.