The AVENUE Project
Supported in part by ONR/DARPA MURI award ONR N00014-95-1-0601 and
NSF grants CDA-96-25374, EIA-97-29844 and IIS -01-21239.
What is AVENUE?
AVENUE stands for Autonomous Vehicle for Exploration and Navigation
in Urban Environments. The goal of this project is to create an
autonomous system capable of building photo-realistic 3D geometrically
accurate models of outdoor sites. The system will be able to plan the
path to a desired viewpoint, navigate a mobile robot to this
viewpoint, acquire images and range scans of the targeted building,
and plan for the next viewpoint.
The development is split into smaller subprojects:
- The view planning and the model acquisition process are described
here.
- The mobile robot navigation system is described below
- A path planning system is described
here
- A comprehensive graphical user interface is also under development.
Click here to see a description. Click
here to see the latest development of
the UI project.
Our robot and accessories
click on the image to enlarge
|
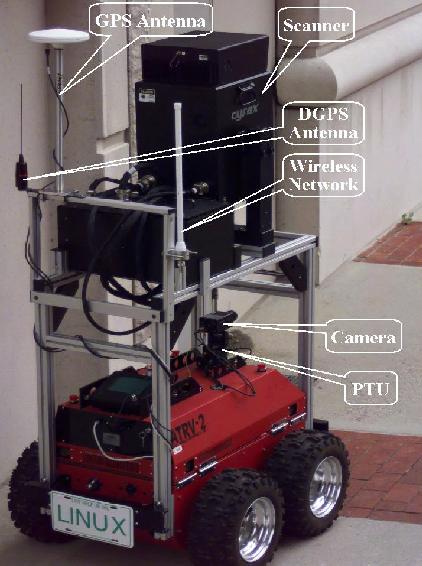
The robot that we use is an ATRV-2 model manufactured by Real World Interface, Inc.. It has a
maximum payload of 100kg (220lbs) and we are trying to
make a good use of that. To the twelve sonars that come with the
robot we have added numerous additional sensors and periphery:
- A pan-tilt unit holding a color CCD camera for navigation and
image acquision
- A Cyrax laser range scanner with extremely high quality and the
unbelievable 100m operating range.
- A GPS receiver working in a carrier-phase differential
(also known as real-time kinematic) mode. The base station is
installed on the roof of one of the tallest buildings on our campus.
It provides differential corrections via a radio link and over the
network.
- A Wavelan wireless network for continous connectivity with remote
hosts during autonomous operations. Numerous base stations are being
installed on campus to extend the range of network connectivity.
The robot and all devices above are controlled by an on-board Pentium
II 300Mhz machine with 64 MB RAM running Linux.
|
The navigation architecture
A major problem when designing a mobile robot
architecture is the distribution of computation. As with battery power,
payload, sensor range, and so on, computational resources are limited
and usually insufficient. This is especially true when it comes to
processing images or large-scale environmental models.
We believe that the correct approach is to distribute computation across
multiple computers. However, placing a number of computers on the robot is
not always desirable -- this would be at the price of reduced payload and
battery life, and is not scalable. A better solution is to
use a distributed wireless system that has the advantages of
providing theoretically unlimited computational and storage resources.
Our efforts are directed towards investigating this approach.
As a first step, we have designed the distributed object-oriented
architecture shown in the figure below.

It is based on Mobility -- a robot integration software
framework developed by RWI, Inc. In addition to helping us handle the
low-level interface with the robot, Mobility provides us with
components that are abstractions of various hardware pieces, such as
sensors and actuators. It is CORBA compliant which translates into
platform, operating system, and programming language independence.
The main building blocks of our system are Mobility components.
Each component is a stand-alone piece of code that performs a specific
task. For example, Odo provides odometric data from the robot
and Drive supplies low-level control commands to the robot.
Important components usually maintain a data structure (also a
component) that represents their state. Other components may query
this data structure about the current or a previous state (client pull
approach) or register with it to receive an automatic notification when
changes occur (a server push approach).
Components performing related tasks are grouped into servers. A server
is a multi-threaded program that handles an entire aspect of the
system, such as robot interfacing, navigation control and so on.
To ensure maximum flexibility, each hardware device is controlled by its
own server. The hardware servers are usually simple and serve three
purposes:
- insulate the other components from the low-level hardware details,
such as interface, measurement units, etc.
- provide multiple, including user-defined, views of the data coming
from the device (e.g. polar or cartesian coordinates)
- control the volume of the data flow, for example the rate at
which images will be grabbed.
Our hardware is controlled by four servers, that perform some or all
of the tasks above. The ATRVServer is the interface to the
robot's hardware and comes with the standard Mobility
distribution. It consists of several components that represent its
sensors and actuators or provide general robot-specific information,
such as shape and dimensions. Two components of main interest are
Odo, which provides position and velocity, and Drive,
which drives the robot.
The NavServer builds on top of the hardware servers and
provides a higher-level interface to the robot. A set of more
intuitive commands, such as ``go there'', ``establish a local
coordinate system here'', and ``execute this trajectory'', are
composed out of the low-level hardware control input. The server also
provides feedback on the progress of the current tasks. It consists
of three modules: Localizer, Controller, and
Navigator.
The Localizer is a part of the robot's control system that
performs data fusion. It obtains new readings from the odometry and
the GPS, registers them with respect to the same coordinate system,
and produces an overall estimate of the robot's position and velocity.
The Controller is a control module that brings the robot to a
desired pose. It executes commands of the type GOTO x,y and
TURNTO phi. Based on its target and the updates from the
Localizer, it produces pairs of desired rotational and angular
velocities that it feeds to the Drive component of the
ATRVServer.
The Navigator monitors the work of the Localizer and the
Controller, and handles most of the communication with the user
interface and other remote components. It accepts commands for
execution and reports the overall progress of the mission. It is
optimized for network traffic: it filters out the unimportant
information from the low-level components and provides a compact view
of the current system state to registered remote modules.
A mission consists of commands that are carried out sequentially. The
user specifies commands using the User Interface (details below) and
sends them to the Navigator for execution. Alternatively,
commands can be sent by any remote component. The Navigator
itself does not execute most of the commands -- it simply stores them
and resends them to the appropriate components, one at a time. It
monitors the progress of the current command and, if it completes
successfully, starts the next one. Additionally, a small group of
emergency commands exists, such as STOP, PAUSE, and
RESUME, that are processed immediately.
The commands stored in the Navigator are accessible to
other modules. This is useful in two ways:
- it allows users who have just connected to the robot to see what
it is trying to achieve and how much it has accomplished
- it allows the robot to continue its mission, even if the network
connectivity is temporarily lost. Moreover, this is the only way to
accomplish a mission that requires passing through a region not
covered by the network.