Abstract
A live-data interactive 3-dimensional modular framework for
mobile robot visualization and control. This extensible system
provides a flexible environment for conducting mobile robot
experiments on a variety of hardware and software platforms.
Introduction
This page describes the design and architecture of a mobile
robot visualization and control software framework and application.
While complete autonomy is often a goal in mobile robotics,
frequently manual control is require to perform experiments,
manage the robot, or simply direct the robot in its task if
further automation is not possible. For research platforms,
the software layer available to the researcher is often very
low-level, requiring an entire experimental API layer to be
written or so general that it is only useful for verifying
hardware functionality or product demos.
RWII provides a sophisticated multi-layer software platform
for their line of robots, including a component-oriented
visualization and control application. In previous work, we
extended RWI's MOM (Mobility Object Manager) UI to handle
our own Mobility-tied robot control services. This approach
was reasonably effective, but had several drawbacks which
eventually resulted in the writing of the software described
here.
Drawbacks of MOM and extensions:
- Modules added to mom require source code modification - while
these mods are simple, they require a source license and then
thereafter you have you maintain your own branch of the vendor's
source tree, re-integrating your modifications for each new version
- Organization is fundamentally interface-oriented. Modules are launched
by selecting them from a list of registered modules for that
particular Mobility/CORBA interface-type. This makes it very difficult
to build an integrated system without creating a heinous mess.
- The threading model provided is simplistic (though simplicity is
not necessarily bad) and extremely manual.
- Each new module require the re-compilation of at least one MOM
source object.
Given the chance to write a visualization/control system from
scratch, it made sense to go all-out and build the whole thing
in 3D. The tools are/were maturing, etc.
Related Work
RWII
Real World Interfaces supplies sensor visualization and control
interface with their Mobility software which lets a user examine
exported CORBA/Mobility objects by launching a type-sensitive
GUI window for each object. Since many objects use the same types,
but interpret the contained data differently, you have to know which
GUI component to launch for each named object. The user manually
spawns a UI component foreach item he is interested in. This allows a
fine degree of control of the visualization canvas and is extremely
convenient for testing during control software development, but lacks
the integrated nature of a more task-oriented interface.
Robot Excavator (U. of Vancouver?)
The U. of V. uses a 3D visualization tool to provide remote and/or
simulated visual feedback for its 4dof joystick-driven backhoe. The backhoe
model controlled by the joystick has a working context and real-time
articulation response keyed to either the model or the live-data sensors
on the actual backhoe. Our visualization objectives are somewhat similar
to the backhoe project, but we also need to be able to modify our
environment in various ways (view platform motion, batch navigation
control, etc.)
Problem/Solution
Build a live-data 3D visualization and control system which
is easy for an independant programmer to extend (without a
source license or custom tree) that allows full-robot descriptions
for easy control of complex experiments.
A user-controled runtime module-loading system allows independantly
developed extensions to be toggled on and off for both development
and experimentation.
Multiple robot support lets you visualize your entire fleet of
robots at once, controlling each independantly.
Publicized Module APIs let modules communicate cooperatively
if required.
possible UI ideas from complex gaming interaction.
CORBA helper routines, but nothing required.
Platform
RWI Pioneers and ATRV2
Our robot hardware platforms currently in use for this
layer of software development is a pair of small RWII Pioneers
with a sonar suite and odometry feedback, and an larger ATRV-2
all-terrain robot with sonars, odometry, GPS, video and digital
compass.
software
- Mobility across CORBA
- The low-level control software is the RWII-supplied Mobility suite.
- Java-1.2.2
- Java3D-1.3
- Jacorb-1.1
- The User Interface is written for Java-1.2.2, Java3D-1.3, and Jacorb-1.1.
Architecture
The Virtual environment consists of a single VitualUniverse
populated by any number of declared Robot objects. Each robot
has any number of robot-specific visualization and control
modules which render data for that particular robot.
The VirtualUniverse may additionally contain some non-robot-specific
modules such as maps or buildings for display.
The Framework architecture consists of a main framework container
which holds the ModuleLoader, VirtualUniverse, and creates the
basic UI components. The ModuleLoader reads a runtime config file
describing the VirtualUniverse and creates the Robots and SensorModules
declared therein. SensorModules may communicate by finding each other
by name as necessary (all configurable in the runtime config) and calling
each other's public APIs. Logging data structures are provided to
module programmers for easy recording of data streams during experiments.
Results
How fast is this?
On a reasonably fast machine the UI performs adequately until
a large number of data streams are managing lots of polygons
at once. Unfortunately the JVM seems to be the limiting factor
on our Linux development platforms. How large is large? maybe
actually not so large? buildings?
** test on windows? dare we? **
How easy is it to develop new modules?
Modules are all subclasses of the SensorModule class which
provides a large API for simplifying development. They are
loaded into the UI at runtime by declaring them in association
with a specific robot (if necessary) in the config file, thereby
keying them for the ModuleLoader. Only declared modules are loaded
for a given robot, so module sets may differ widely across robots
with different capabilities.
Relevant/Special module description
- NavServerModule
- One of the main workhourse control modules is the front-end to the
Navigation and Localizer system which provides a task-oriented API
containing commands ranging from basic motion (GOTO, TURNTO) to camera
control, and a batch command processing facility. The NavServer
command "targets" are managed via a combination list widget and
universe manifestation interface. The user can manage navigational
targets by clicking in the virtual world and dragging the generated
golf-cup-style flags around. An integrated Voronoi-based pathplanner
in the client can optionally be used to interpolate safe paths between
geographic targets.
- Active Robot
- The notion of an "active" robot separates robot control windows from
one another. Generally only one module receives user input at a time,
and the currently active robot's windows will be shown by default
while the others are hidden to minimize confusion. Modules may also
choose to render their data differently depending on whether or not
they are active. The robot manifestation module, for example, draws a
ring around the robot if it is active.
|
|
 Screenshot of 3D RobotUniverse window w/ a robot and some
NavTargets
Screenshot of 3D RobotUniverse window w/ a robot and some
NavTargets
|
|
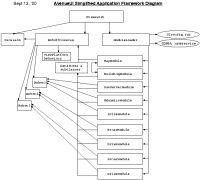 Framework class and dataflow diagram
Framework class and dataflow diagram
|

|
|