Abstract
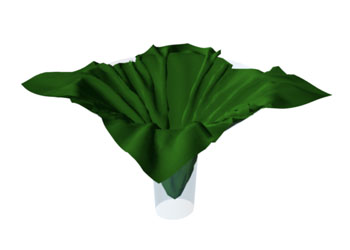
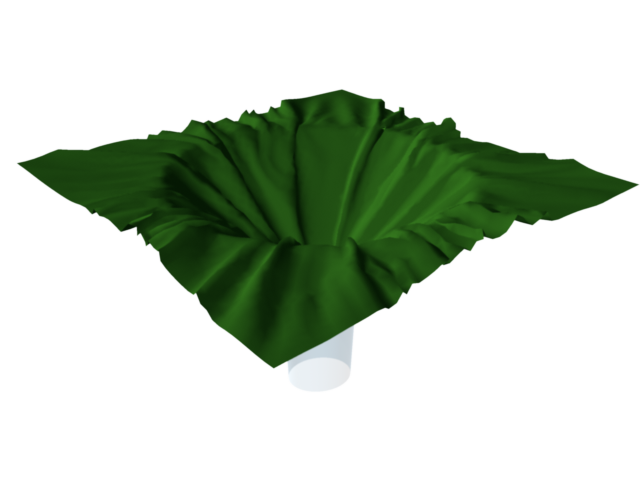
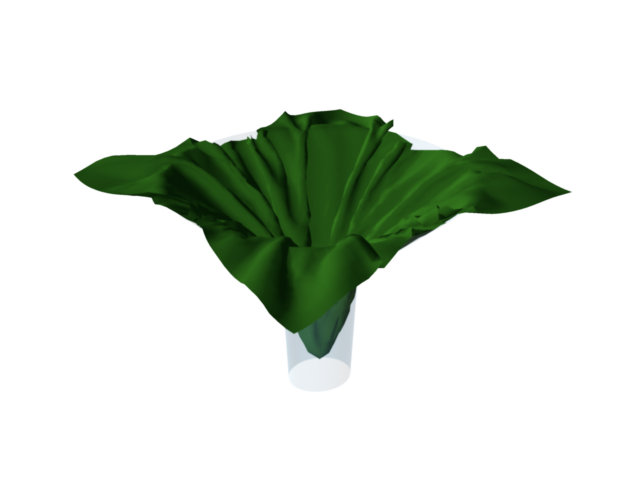
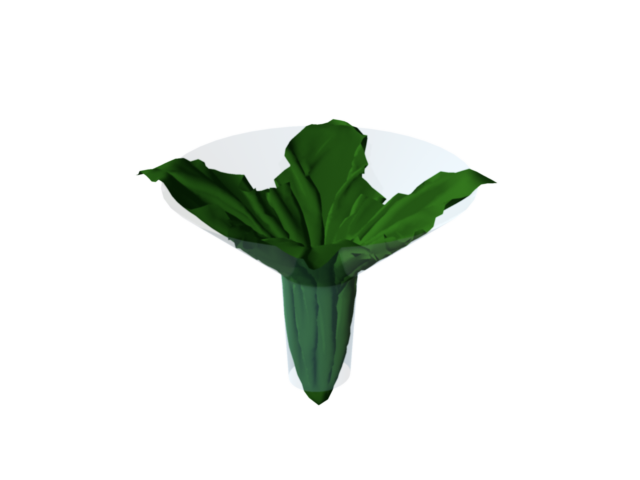
Robust treatment of complex collisions is a challenging problem in cloth simulation. Some state of the art methods resolve collisions iteratively, invoking a fail-safe when a bound on iteration count is exceeded. The best-known fail-safe rigidifies the contact region, causing simulation artifacts. We present a fail-safe that cancels impact but not sliding motion, considerably reducing artificial dissipation. We equip the proposed fail-safe with an approximation of Coulomb friction, allowing finer control of sliding dissipation.