Peter Allen, Joel Stein*, Sanjay Joshi** PI's
Department of Computer Science
Department of Rehabilitation Medicine*
Columbia University
Department of Mechanical & Aerospace Engineering, University of California, Davis**
| NSF Grant
1208153: Assistive Robotics for Grasping and Manipulation using Novel Brain Computer Interfaces Peter Allen, Joel Stein*, Sanjay Joshi** PI's Department of Computer Science Department of Rehabilitation Medicine* Columbia University Department of Mechanical & Aerospace Engineering, University of California, Davis** |
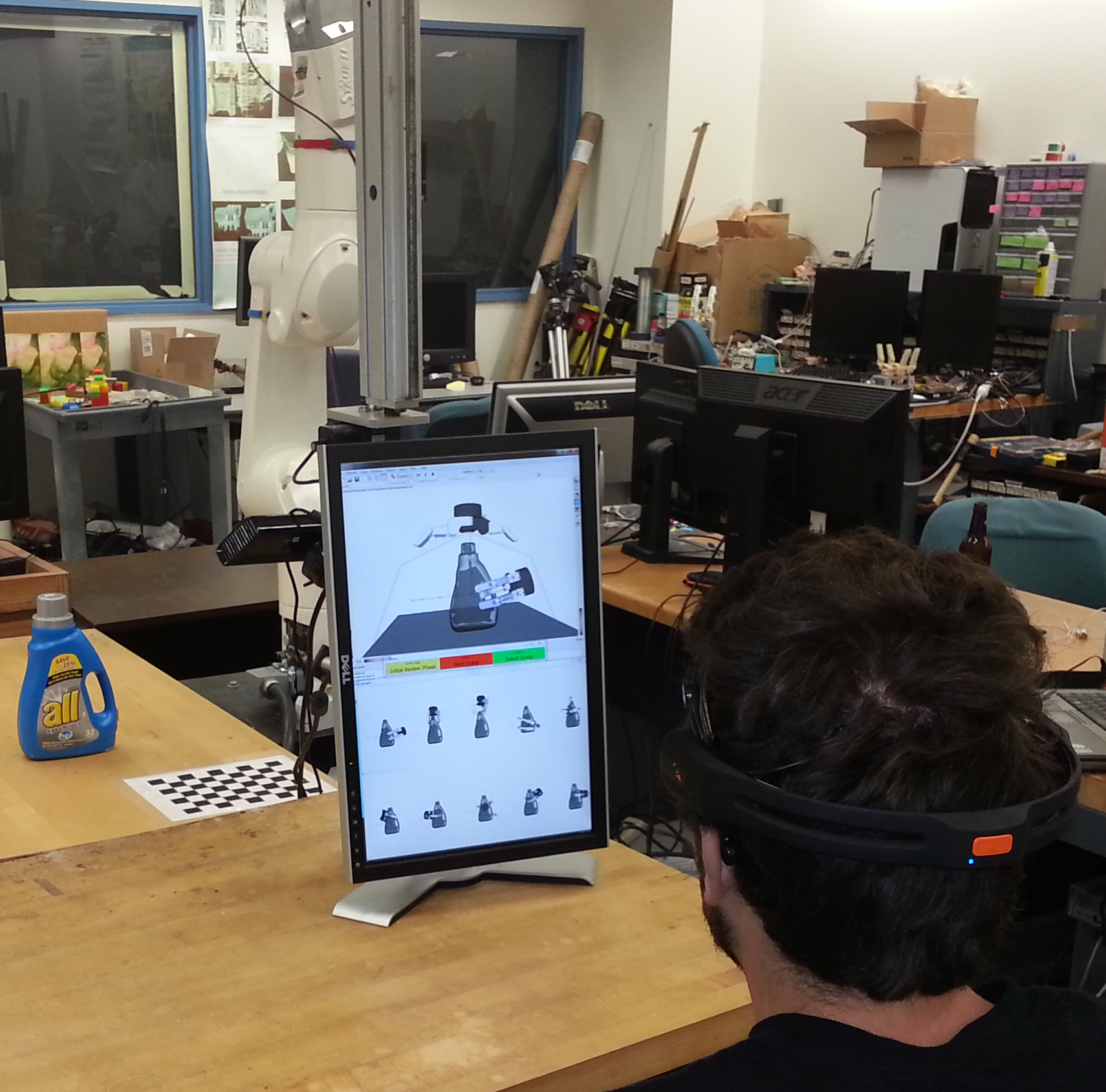
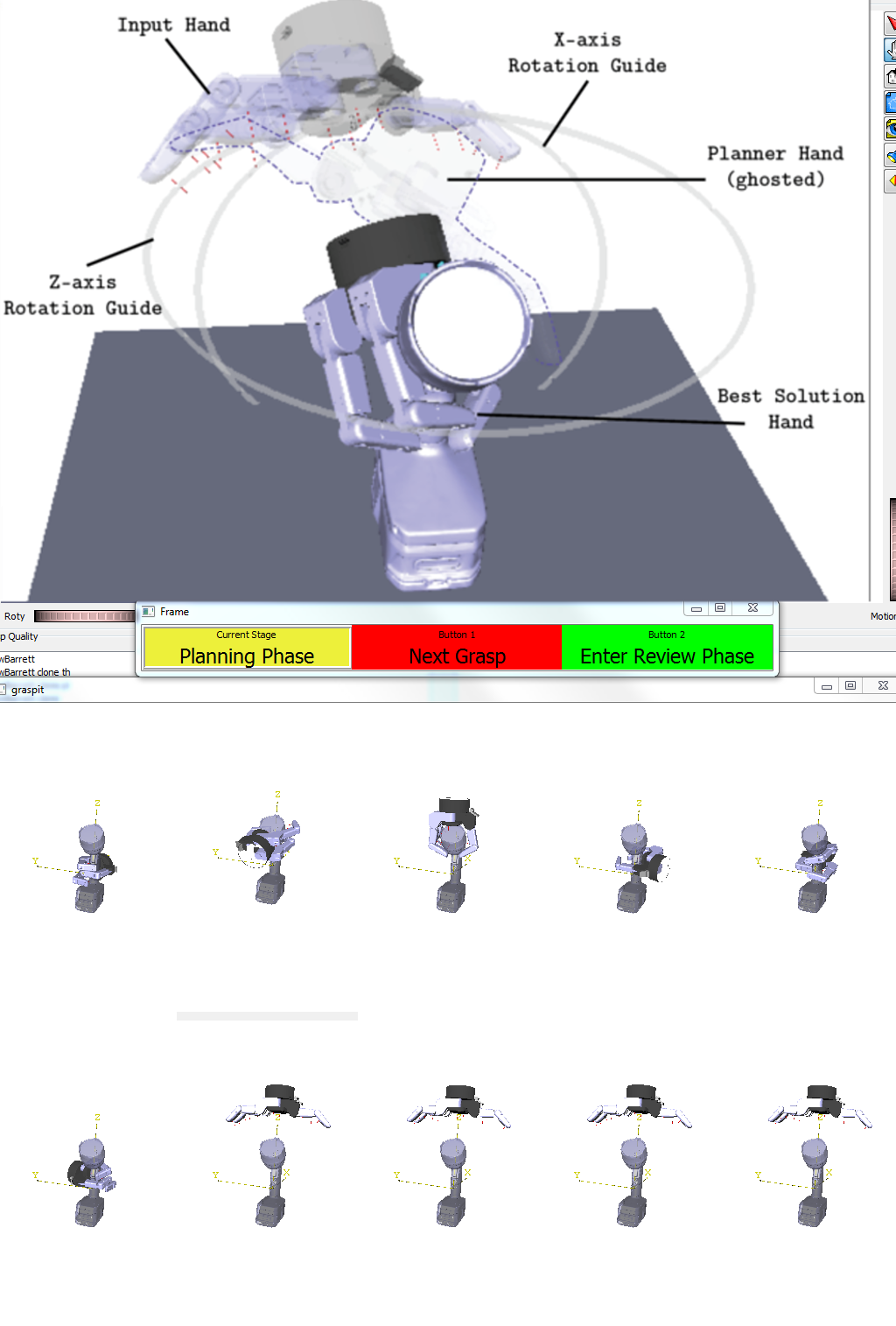
| This is a collaborative proposal (with UC Davis) which is aimed at making concrete some of the major goals of Assistive Robotics. A team of experts has been brought together from the fields of signal processing and control (PI Sanjay Joshi), robotic grasping (PI Peter Allen), and rehabilitative medicine (PI Joel Stein) to create a field-deployable assistive robotic system that will allow severely disabled patients to control a robot arm/hand system to perform complex grasping and manipulation tasks using novel Brain Muscle Computer Interfaces (BMCI). Further, the intent of this effort is not just technology-driven, but is also driven by clear and necessary clinical needs, and will be evaluated on how well it meets these clinical requirements. Validation will be performed at the Department of Regenerative and Rehabilitation Medicine at Columbia University on a diverse set of disabled users who will provide important feedback on the technology being developed, and this feedback will be used to iterate on the system design and implementation. |
| Weisz, J., Shababo, B., Dong, L. and Allen, P., Grasping with Your Face, 13th International Symposium on Experimental Robotics (ISER) June 17-21, 2012. Video |
| User Interface for Assistive Grasping by Jonathan Weisz, Carmine Elvezio, and Peter K. Allen, IEEE Intelligent Systems and Robots, Tokyo, Nov. 3-8, 2013. Video |
| Jonathan Weisz, Alexander G. Barszap, Sanjay S. Joshi, and Peter K. Allen, Single Muscle Site sEMG Interface for Assistive Grasping, EEE/RSJ International Conference on Intelligent Robots and Systems (IROS) September 14-18, 2014. Chicago. Video |
| Robert Ying and Jonathan Weisz and Peter K. Allen. Grasping with your brain: a brain-computer interface for fast grasp selection International Symposium on Robotics Research (ISRR), September 12 to 15, 2015, Sestri Levante, Italy |
| Jacob Varley, Jonathan Weisz, Jared Weiss, and Peter Allen. Generating Multi-Fingered Robotic Grasps via Deep Learning IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2015, Hamburg. . |
| Jonathan Weisz, Yipeng Huang, Florian Lier, Simha Sethumadhavan, and Peter Allen. RoboBench: Towards Sustainable Robotics System Benchmarking, IEEE International Conference on Robotics and Automation (ICRA), Stockholm, May 2016. |
| Jacob Varley, Chad DeChant, Adam Richardson, Joaquín Ruales, and Peter Allen Shape Completion Enabled Robotic Grasping, IEEE/RSJ International Conference on Robots and Systems (IROS). Vancouver, 2017. |
| Jorge Guerra, Jasim Uddin, Dawn Nilsen, James Mclnerney, Ammarah Fadoo, Isirame B. Omofuma, Shatif Hughes, Sunil Agrawal, Peter Allen Capture, Learning, and Classification of Upper Extremity Movement Primitives in Healthy Controls and Stroke Patients,International Conference on Rehabilitation Research (ICORR), London.. |
| Jonathan Weisz, Peter K. Allen, Alexander Barszap, Sanjay S. Joshi Assistive grasping with an augmented reality user interface, International Journal of Robotics Research, 36. 543, 2017. |
| David Watkins , Chaiwen Chou , Caroline Weinberg, Jacob Varley , Kenneth Lyons , Sanjay Joshi , Lynne Weber, Joel Stein , and Peter Allen Human Robot Interface for Assistive Grasping, tech report, 2017. |
|
|