#include <pthread.h>
int pthread_create(pthread_t *restrict tidp,
const pthread_attr_t *restrict attr,
void *(*start_rtn)(void *), void *restrict arg);
Returns: 0 if OK, error number on failure
void pthread_exit(void *rval_ptr);
int pthread_join(pthread_t thread, void **rval_ptr);
Returns: 0 if OK, error number on failure
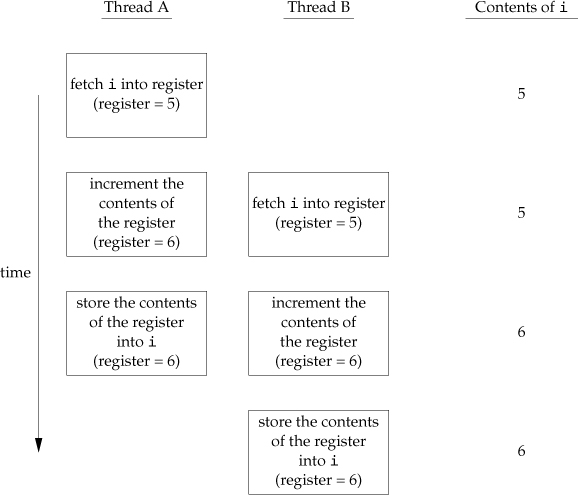
i++:
#include <pthread.h>
int pthread_mutex_init(pthread_mutex_t *restrict mutex,
const pthread_mutexattr_t *restrict attr);
int pthread_mutex_destroy(pthread_mutex_t *mutex);
Both return: 0 if OK, error number on failure
int pthread_mutex_lock(pthread_mutex_t *mutex);
int pthread_mutex_trylock(pthread_mutex_t *mutex);
int pthread_mutex_unlock(pthread_mutex_t *mutex);
All return: 0 if OK, error number on failure
#include <pthread.h>
#include <time.h>
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex,
const struct timespec *restrict tsptr);
Returns: 0 if OK, error number on failure
Deadlock condition:
Strict lock ordering avoids deadlock
See APUE 11.11 and 11.12 for examples of using two mutexes
#include <pthread.h>
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
Both return: 0 if OK, error number on failure
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
All return: 0 if OK, error number on failure
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
Both return: 0 if OK, error number on failure
#include <pthread.h>
#include <time.h>
int pthread_rwlock_timedrdlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict tsptr);
int pthread_rwlock_timedwrlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict tsptr);
Both return: 0 if OK, error number on failure
#include <pthread.h>
int pthread_cond_init(pthread_cond_t *restrict cond,
const pthread_condattr_t *restrict attr);
int pthread_cond_destroy(pthread_cond_t *cond);
Both return: 0 if OK, error number on failure
int pthread_cond_wait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex);
int pthread_cond_timedwait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex,
const struct timespec *restrict tsptr);
Both return: 0 if OK, error number on failure
int pthread_cond_signal(pthread_cond_t *cond);
int pthread_cond_broadcast(pthread_cond_t *cond);
Both return: 0 if OK, error number on failure
Example:
#include <pthread.h>
struct msg {
struct msg *m_next;
/* ... more stuff here ... */
};
struct msg *workq;
pthread_cond_t qready = PTHREAD_COND_INITIALIZER;
pthread_mutex_t qlock = PTHREAD_MUTEX_INITIALIZER;
void process_msg(void)
{
struct msg *mp;
for (;;) {
pthread_mutex_lock(&qlock);
while (workq == NULL)
pthread_cond_wait(&qready, &qlock);
mp = workq;
workq = mp->m_next;
pthread_mutex_unlock(&qlock);
/* now process the message mp */
}
}
void enqueue_msg(struct msg *mp)
{
pthread_mutex_lock(&qlock);
mp->m_next = workq;
workq = mp;
pthread_cond_signal(&qready);
pthread_mutex_unlock(&qlock);
// In the textbook, the last two lines are written in reverse order:
//
// pthread_mutex_unlock(&qlock);
// pthread_cond_signal(&qready);
//
// Taking pthread_cond_signal() call out of the mutex region is
// allowed (and better) in this particular case, but it is not
// always safe to do so.
}
wait(), notify() and notifyAll()Last updated: 2018–02–07