Training Set (lenna)


Test Set 1 (camera and Jack)




Test Set 2 (Baboon)
May 13, 1999
Edge detection has been a field of fundamental importance in digital
imaging research. Edges can be defined as pixels located at points
where abrupt changes in gray level take place. By marking the edges
of individual objects, an image can be segmented; the individual segmented
objects can be indexed and classified; and semantic characteristics of
the image can be identified.
Neural networks often provide important insights in developing new algorithms and take on key roles in real-time expert systems, but its application to image processing in general is not very well studied, perhaps due to the lack of practical applications. In this paper, we attempt to use neural networks as a system for image processing, namely for edge detection. By applying BPNNs to a problem as well defined as edge detection, we are allowed to uncover neural networks' abilities and limitations using an existing technique as a reference. This information can provide important guidance when building adaptive image processing systems that does exploit the strengths of neural networks.
In our study, we built training and test sets by sub-dividing several images into blocks. We train the neural networks into edge detectors with target blocks produced from the convolution of Sobel's gradient operators and the input images. Several networks result from variations in block sizes and the number of hidden nodes in the networks. We then evaluate these networks by comparing their performance on the test cases with numerical results. We then use the networks to produce edge maps to understand the qualitative context of their abilities.
Section 2 details the theories involved by our approach in preparation
of this study. Section 3 provides the quantitative and qualitative
results of experiments comparing several neural networks; there we provide
our analysis. Section 4 concludes this paper with a summary of the
results.
|
|
Training Set (lenna)
Test Set 1 (camera and Jack)
Test Set 2 (Baboon)
4x4 Block Edge Detection BPNN with 4 Hidden Units
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
In the next chart, we evaluate an 8x8 block network with 4 hidden units. It is very evident that this network suffers from a learning bottle neck. All of the training set and the two test sets reaches asymptotes early on in the training process with high mean square errors. More over , the performance of test set 2 degrades steadily even as the network is being trained. The next 8x8 block network, with 16 hidden units, sees significant improvements on training set and test set 1 performance, but the pattern of performance degradation in test set 2 persists.
It appears that test set 2 contains very different features from the training set. This is evident in its poor performance in all of the four networks we investigated, and by comparing the two sets qualitatively. While lenna contains many smooth surfaces both in the foreground and background, the baboon is covered with fur. Increasing the input block size thus resulted in the network over fitting on the training set, depriving it of its ability to detect edges effectively in test set 2. Also, by comparing the result of the 8x8 block networks from the 4x4 block networks, we notice that the 8x8 block networks performs worse in both cases. As we discussed in the previous session, increasing the block size being processed will introduce extra information. We can infer from these two pieces of evidence that in edge detection, a smaller block size is always better. The extra information in the 8x8 block seems to be interfering with the edge detection process.
We also notice that increasing the hidden units in both cases introduces
significant improvements in network performance. In the 4x4 block
network, it evens breaks the deadlock on test set 2 performance.
If hidden units are feature extractors, as we discussed in the previous
session, then it makes sense that by introducing more hidden units, we
create finer granularity in identifying different types of edges and increase
our chance of telling edge points apart from non edge points.
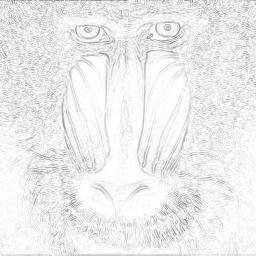
The following edge maps are produced by the four networks, with
the map produced by the 4x4 network with 16 hidden units performing closest
to Sobel. As expected, the edge map to the lower left is smothered
by noise, often with entire blocks being gray. There edges are detected,
but there is not enough hidden units vs block size to pin point the edge
pixels. The 8x8 (16 hidden) network performs better, but in
general the networks with smaller block sizes outperform the rest.



Camera edge Maps produced by, from top left, clockwise, 4x4 (4 hidden),
4x4 (16 hidden), 8x8 (16 hidden), and 8x8 (4 hidden)
The baboon is not at all recognizable in the 8x8 ( 4 hidden ) network. This is the worst performing set. The edges identified in 4x4 (16 hidden) are not as strong due to lack of coherence between the edge features of the nose and the surrounding hair.

Baboon edge Maps produced by, from top left, clockwise, 4x4 (4 hidden),
4x4 (16 hidden), 8x8 (16 hidden), and 8x8 (4 hidden)
It is conceivable that, with adequate training, BPNN can perform well
as simulators of existing algorithms; however, the edge detectors in the
networks are formed automatically without explicit knowledge of how the
target algorithm works, and surprisingly, both methodologies share certain
similar features. But there is a fundamental difference: while convolution
with Sobel operators is used to produce edge points at each pixel, BPNN
propagates pixel values and have them converge at some point to form edge
points. This is added complexity in edge detection; however, it is
also a key characteristic of neural network algorithms that can be exploited
when information must be gathered from disconnected regions of an image.
An example where is can be used is finding motion vectors in predictive
compression algorithms for digital video.