Robotics Lab
,
Computer Science Department,
Columbia University
Overview
The main
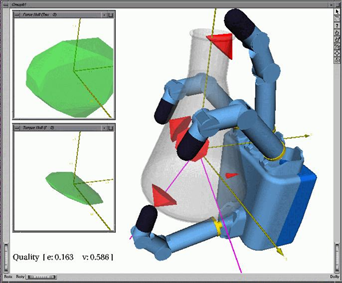
GraspIt!
page has moved to
http://graspit-simulator.github.io/
.