SCARA Calibration
Overview
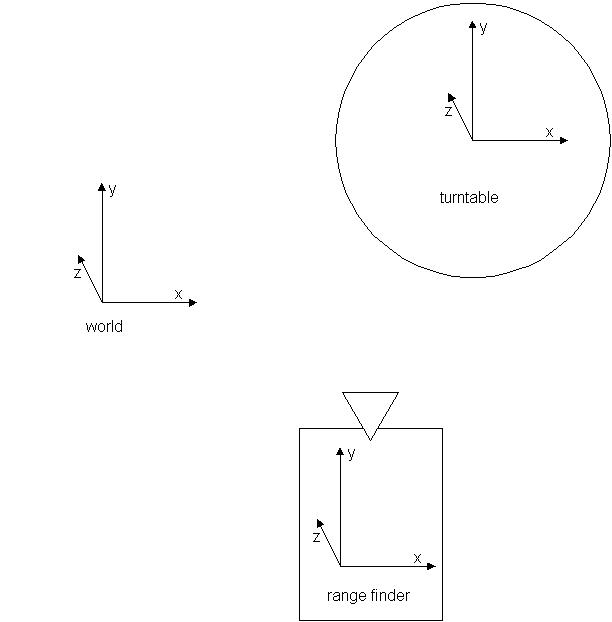
Fig.1: Coordinate systems
This project addressed the need for a program that will
automatically determine the transformation between the
coordinate frame of an IBM-7575 SCARA robot with a laser
range finder mounted on its end-effector and a mobile
turntable stage placed anywhere on the robot platform.
The robot, the scanner and the turntable form a scanning platform that we use to obtain 3-D models of real objects placed on the turntable. Since objects come in different shapes, it is necessary to scan them from many different viewpoints. This is achieved by turning the turntable. In order to stitch the scans we obtain this way into a coherent single 3-D model we need to have an accurate estimate of the relative positions and orientations of the laser scanner and the turntable.
This project investigates the issue of how to automatically determine the needed transformation.
Hardware
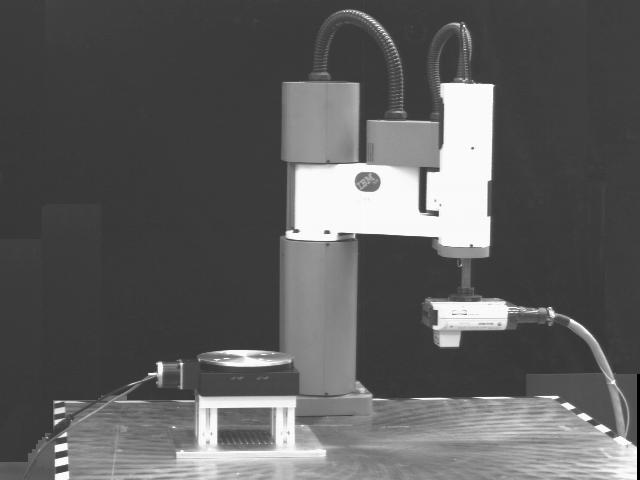
Fig.2: Our hardware setup
Our hardware setup consists of:
- an IBM-7575 SCARA robot. The robot has three degrees of freedom, however only one is used: it moves the scanner up and down.
- a planar laser range scanner that only scans in a horizontal plane. This is why it needs to be moved up and down by the robot to scan the entire object.
- a custom-made turntable stage that rotates the object so that it can be scanned from various viewpoints.
- a Sun workstation that controls the above hardware via its serial interfaces.

