Protein Crystal Manipulation Projects
Microrobotic System
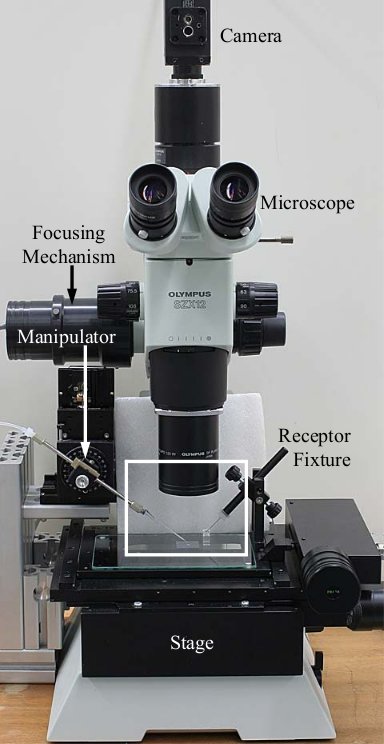
Fig.1: Our microrobotic system
The system is based on an MP-285 micropositioner made by Sutter Instrument, which is a Cartesian robot with three degrees of freedom, a work space of approximately 16 cubic centimeters and translational resolution as good as 40nm in each direction. It has zero backlash and its fine-grain motion control is used when high positioning accuracy is needed. The micropositioner holds and operates a micromanipulation tool (e.g. a cryogenic loop, a cat whisker, or one of our custom microshovels) as its end-effector.
For faster and larger-scale motion, we use a motorized Prior ProScan stage which has two degrees of freedom of horizontal motion and a large enough working range to process a 24- or a 96-well crystallization plate. The stage is mounted on a model SZX12 optical microscope manufactured by Olympus, which provides a total magnification between 8.4x and 108.0x and is used to observe the work.
Live video feedback of the work is captured and fed to a generic personal computer with a 2.6 GHz CPU and 1 GB RAM by a camera mounted on the microscope. The PC runs custom software developed as part of the system, which processes the video stream to analyze the scene and controls the motion of the micropositioner and the stage according to the task at hand.

